配属希望の学生へ
希望する学生像

研究のための研究に終わらない、社会に役立つ技術を創出する実践力を修得しましょう。
研究をやる気をもって熱心に進められる人、周りを巻き込み元気よくプロジェクトを進められる人、ぜひ配属希望してみてください。
何かわからないこと、研究室のことで気になることがあればお問い合わせフォームよりお問い合わせください。
研究テーマ
ロボットをはじめとする機械システムへの制御理論の応用を研究しています。主要な研究テーマは、人と触れ合うロボットの制御技術(福祉メカトロニクス、パワーアシスト)、自動運転支援システム、ディープラーニング(インテリジェントビルの消費電力予測、自動運転、機械システムの故障予兆診断)、生物模倣ロボット、クレーンの揺れ止めなどのモーションコントロールで、以下のように分類できます。
高機能モーションコントロール
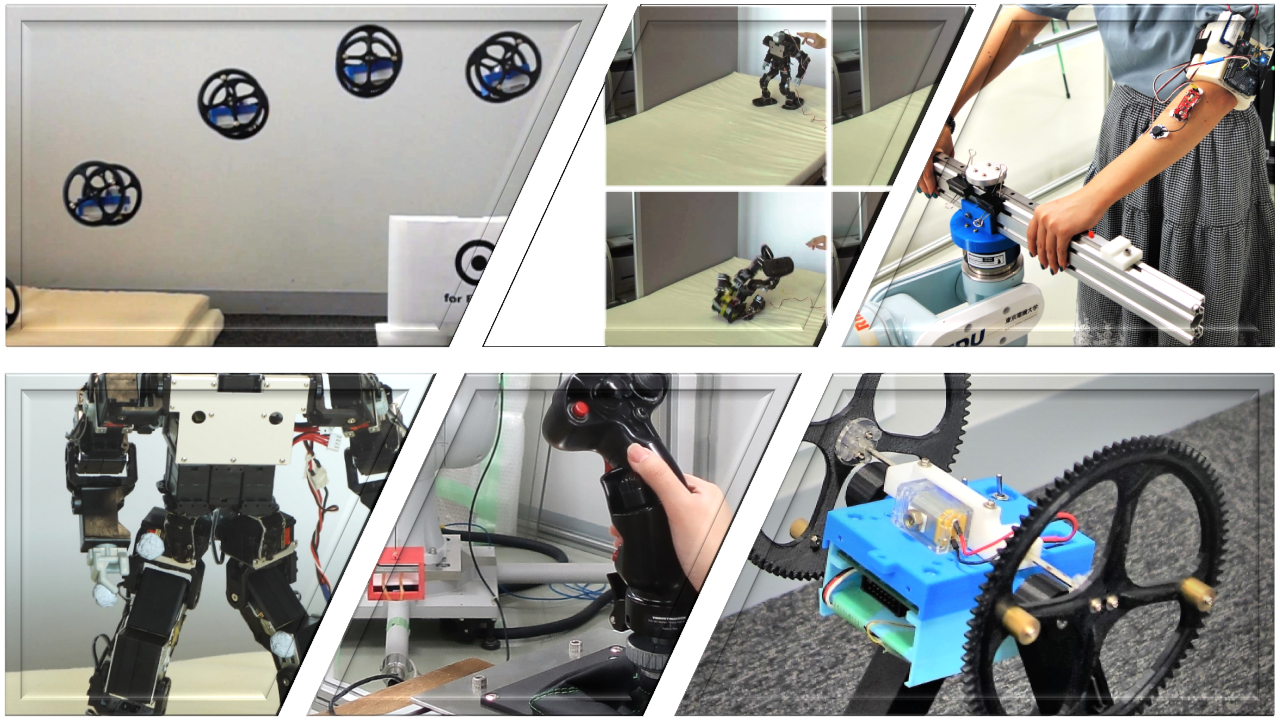
- 人間協働、人間適応型ロボット(ソフトロボティクス)
- 生物模倣型ロボット
- 二足歩行ロボット
- 遠隔操作ロボット(危険作業・演劇)
産業応用メカトロニクス制御

- 自動運転支援システム(人と機械の役割分担制御など)
- 福祉・医療(筋電義手、パワーアシスト機器など)
- 産業メカトロニクス(クレーンの揺れ止め制御、磁気ディスク装置や工作機械のナノスケールの高速・高精度サーボ技術など)
機械知能化を目指したAI・深層学習

- ゼロエネルギービルの消費電力予測
- 自動運転システム
- 機械システムの故障予兆診断
人道目的の対人地雷探知・除去

- においセンサ、金属探知機の応用
- ドローンの自動飛行技術
【キーワード】:人協働ロボティクス、自動運転・操作支援、生物模倣、高機能モーションコントロール、介護・福祉メカトロニクス、AI・深層学習(ディープラーニング)、高速・高精度サーボ
最近の卒論テーマの例
- 人間適応型自動運転支援システムの研究
- 生体信号に基づく人間適応型メカトロニクスの研究
- 生物の動きを模倣した跳躍型ロボットの研究
- 正確さとしなやかさを両立する人協働ロボットの研究など