研究業績
2025 IEEE International Conference on Advanced Robotics and its Social Impacts (ARSO)
2025.7.17-2025.7.19 🡕
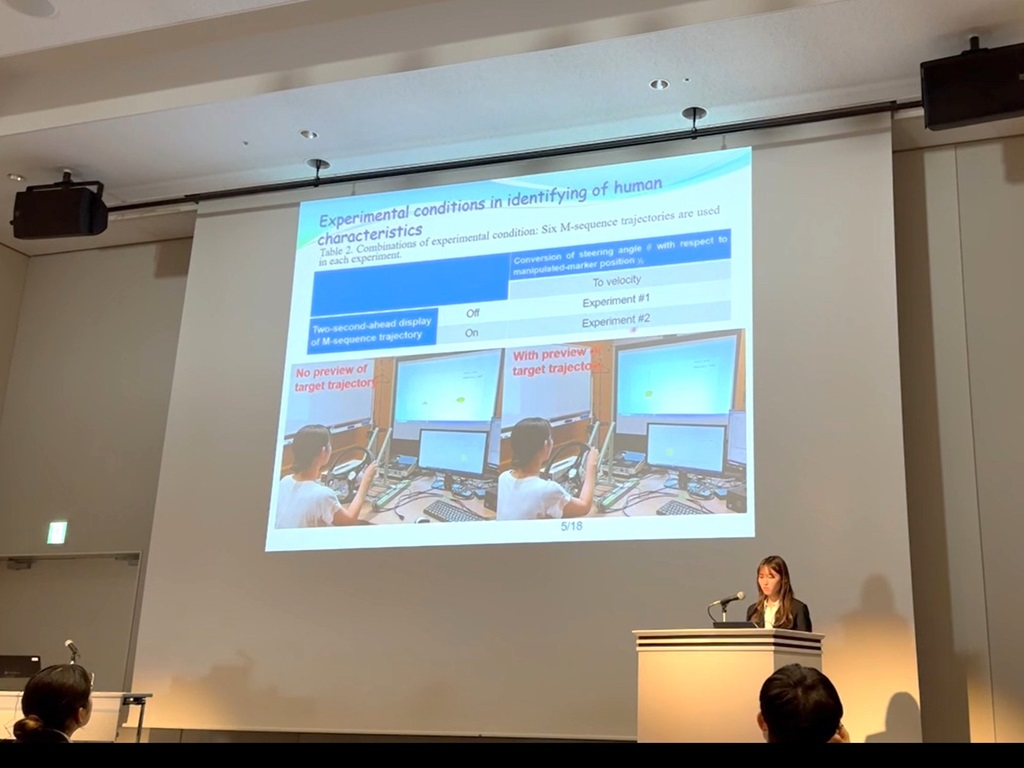
関 涼夏
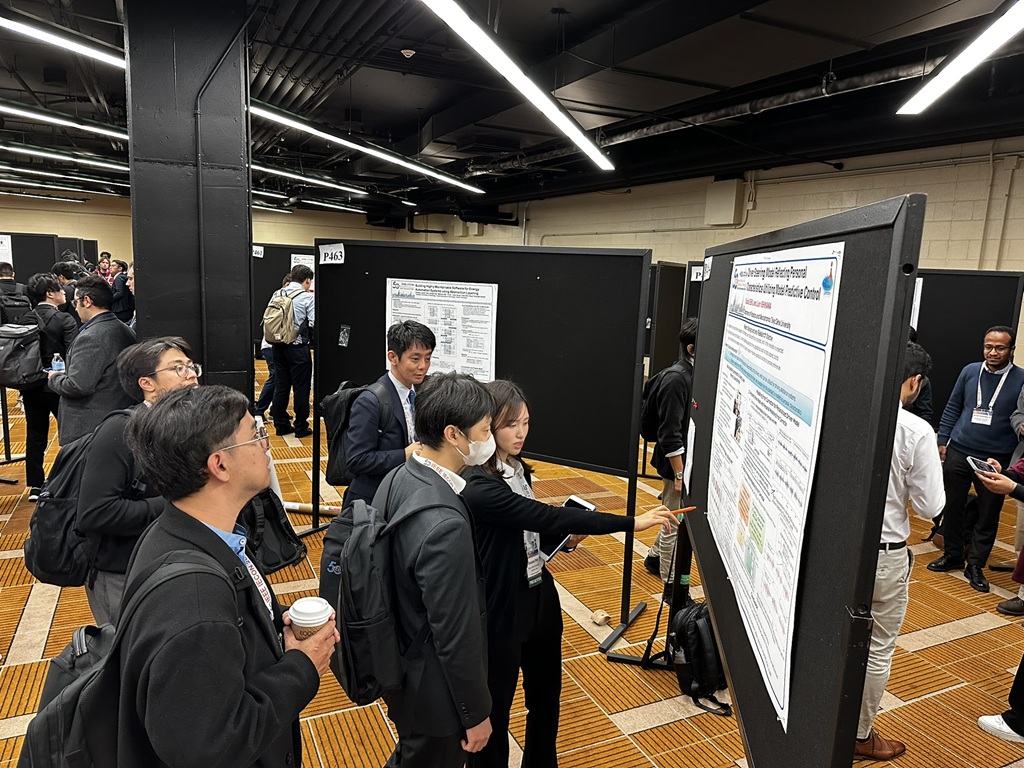
「HIL-Based Experimental Evaluation of Driver Steering Model Reflecting Personal Characteristics Utilizing Model Predictive Control」
大阪で開催された国際会議ARSO2025に参加しました。この学会は、高度なロボット技術に関する安全基準や倫理的課題に加え、医療、教育、自動運転など幅広い分野での活用と、それに伴う社会的影響について議論される国際会議でした。採択件数は59件で、私は「Intelligent Mobile Robots」というセッションで、12分間の口頭発表を行いました。初めての口頭発表で非常に緊張しましたが、無事に発表を終えることができました。懇親会では他大学の研究者の方々とも交流ができ、貴重な時間を過ごすことができました。また、発表以外にも観光を楽しむなど、とても充実した出張となりました。今回の経験を踏まえ、英語力の向上に努めるとともに、今後も国際会議に積極的にチャレンジし、より活発な議論ができるよう努力していきたいと思います。




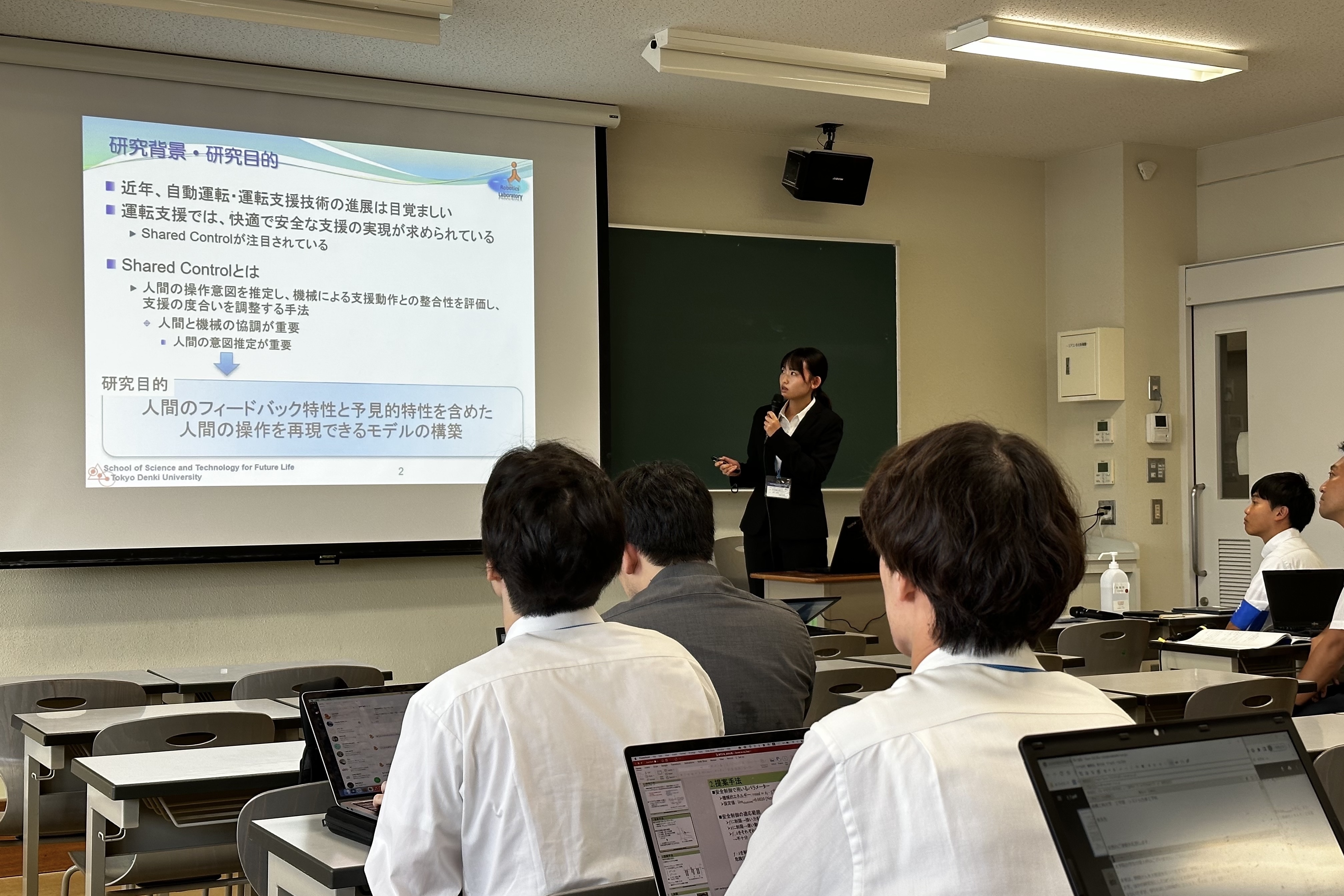
日本機械学会 ロボティクス・メカトロニクス 講演会 2025 in Yamagata
2025.6.4-2025.6.7 🡕
関 涼夏
「C運転支援に活用可能な個人特性を反映したドライバモデルの逐次最小二乗法を用いたオンライン同定」
西山 優希
「モデル予測制御に基づくクレーンブームの位置決め操作支援システム」
青柳 大空
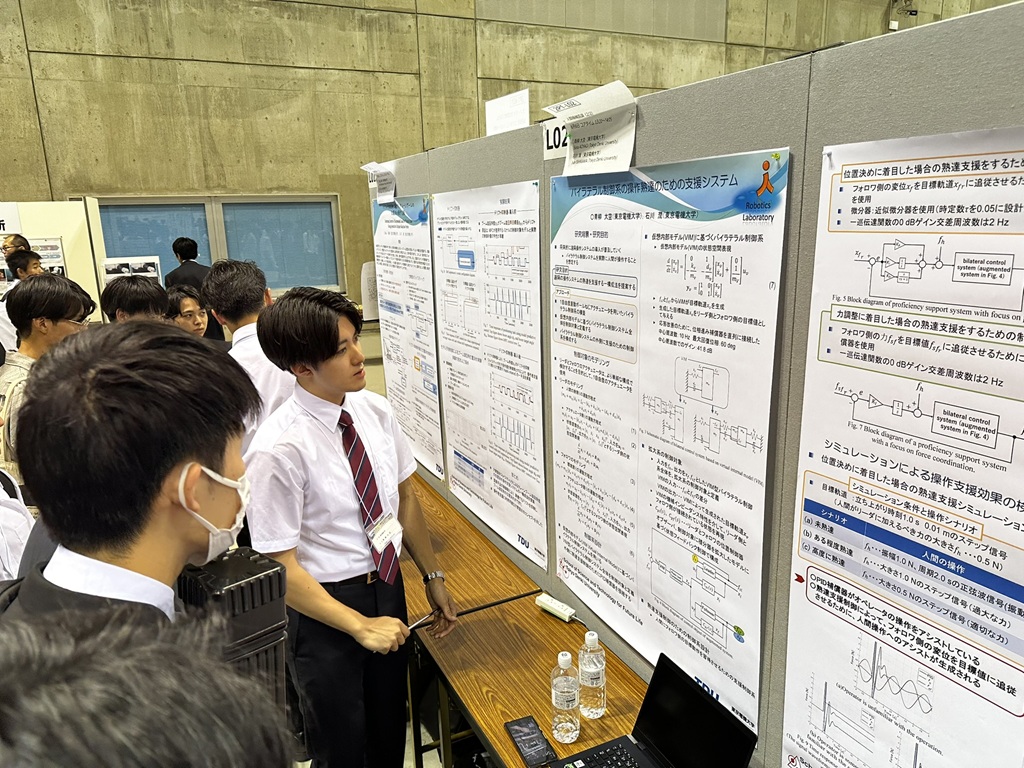
「バイラテラル制御系の操作熟達のための支援システム」
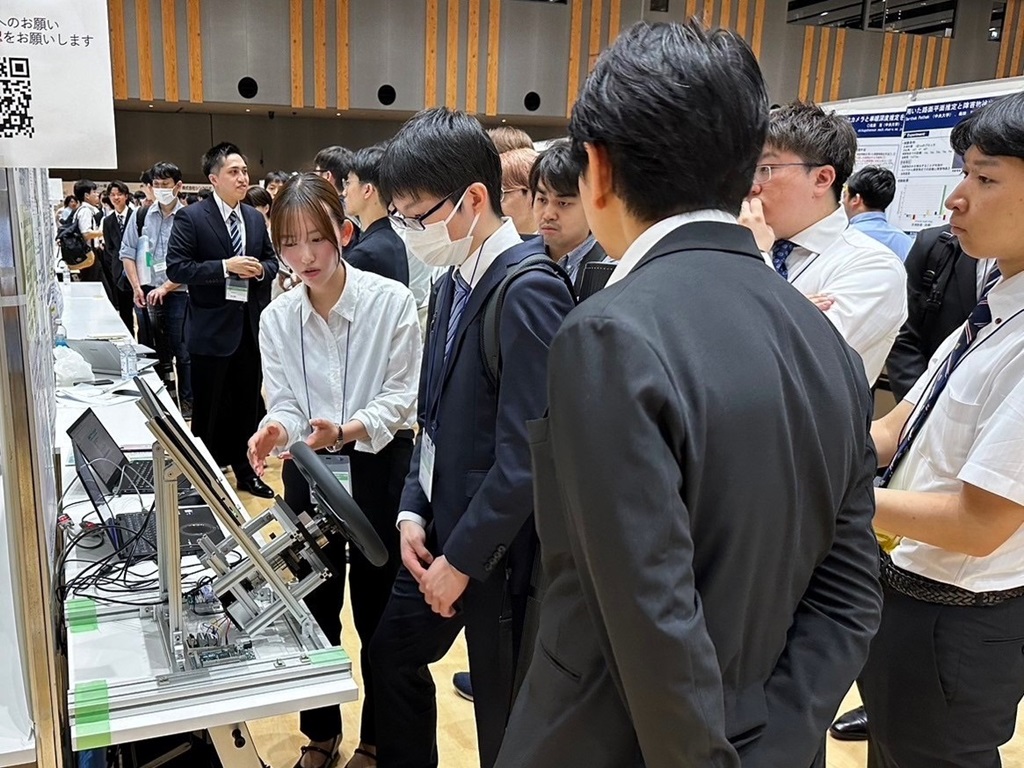
この学会は、「フロンティアを拓くロボティクス・メカトロニクス」をテーマに1539件の発表、2,300名を超える方々が参加しました。過去最大級の規模であったということもあり、発表と質疑応答が絶え間なく行われ、非常に活発な議論が行われました。私たちは、ポスターセッションとして45分間のポスター発表を行い、教授や学生、企業などの多くの方々に聞きに来ていただきました。この経験や様々の方にいただいた意見を今後の研究活動に活かしていきたいと思います。出張中には、日本酒や山形牛など様々な特産品を楽しみました。


第25回計測自動制御学会システムインテグレーション部門講演会 SI2024 優秀講演賞
2025.2.17 🡕
関 涼夏
「モデル予測制御を活用した個人特性を反映したドライバモデルの実装評価」
未来科学研究科 ロボット・メカトロニクス学専攻の関涼夏さんが、昨年12月18日から20日に岩手県で開催された、第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)において、優秀講演賞を受賞しました。関さんは、SI2023に引き続き、2年連続での受賞となります。
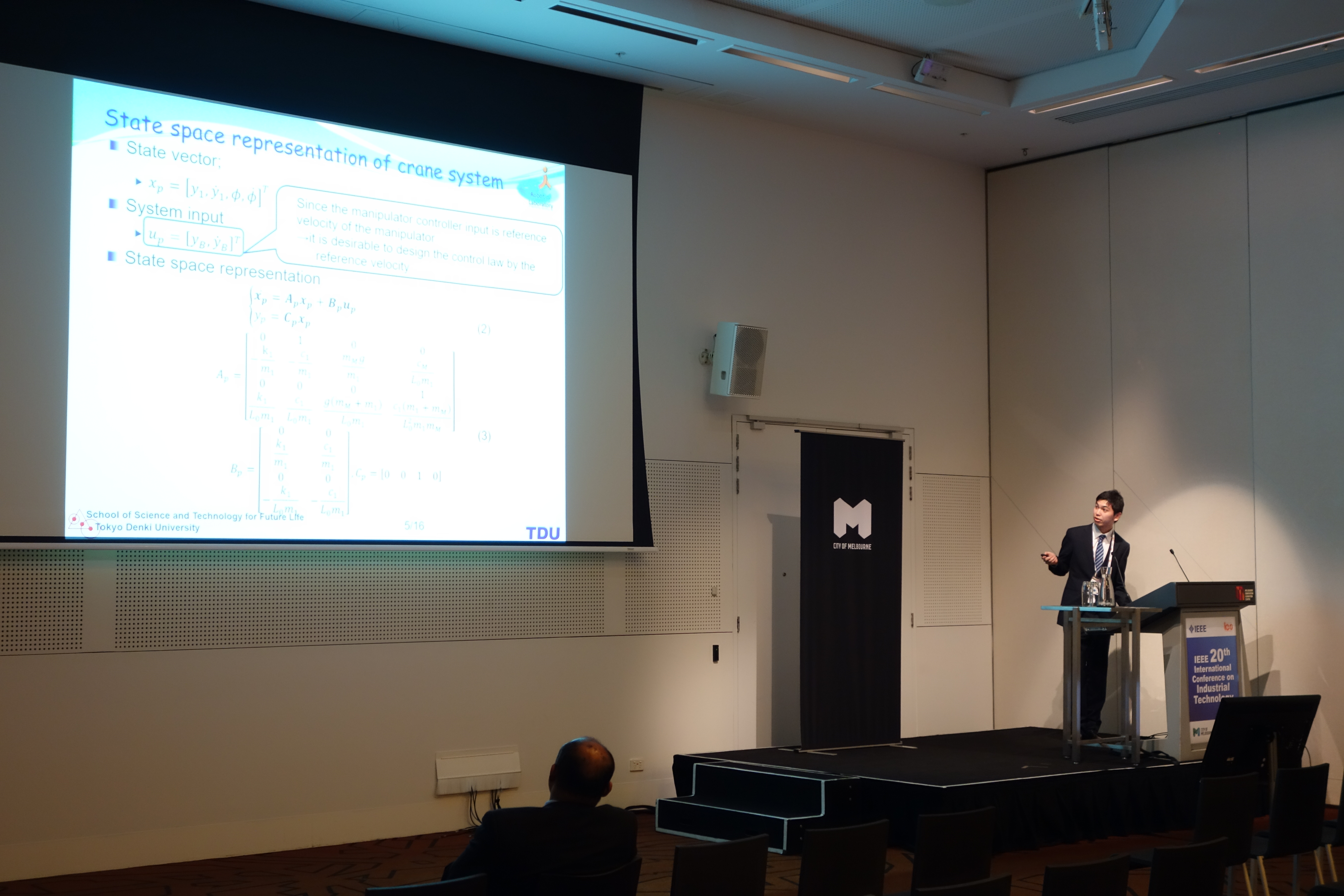
2025 IEEE International Conference on Industrial Technology (ICIT2025)
2025.3.26-2025.3.28 🡕
西山 優希
「Crane Operation Support System with Damping Control Function Using Model Predictive Control」
中国の武漢で開催された国際学会 ICIT 2025 に参加しました。この学会は IEEE Industrial Electronics Society (IES) が主催する会議であり、コンピュータ制御システム、ロボット工学、自動化、画像・信号処理、パワーエレクトロニクスなどの分野に焦点を当てた国際会議です。本会議では151件の発表が行われ、その中でも私は “Control Systems, Robotics and Mechatronics I” というセッションで発表しました。発表形式は 10分の口頭発表に続いて5分の質疑応答 という形式でした。初めての国際会議だったため、事前に入念な準備を行い、本番に臨みました。発表自体は順調に進みましたが、質疑応答では苦戦する場面もありました。また、学会以外では、武漢の名所である黄鶴楼や市街地を、他大学の教授のご厚意で車で案内していただき、貴重な経験を得ることができました。



令和7年電気学会全国大会
2025.3.18-2025.3.20 🡕
宮内 太聞
「高サンプリング信号観測に基づく制御周期内システム同定による適応PID制御の実現可能性」
明治大学中野キャンパス、駿河台キャンパスにて開催された令和7年電気学会全国大会に参加しました。本学会は約1200件の一般講演をはじめ、シンポジウムや特別講演などの内容で、パワーエレクトロニクス技術や、制御、センシング技術、産業システムなど幅広い分野のテーマについて発表が行われました。学会では、口頭発表8分、質疑応答3分の計11分の発表を行いました。今回初めてとなる学会での発表を通じて、様々な質問やコメントをいただくことができたため、今後の研究に活かしていきたいです。また様々な講演の聴講を通じて、学会発表という機会の重要性をより実感したため、研究活動へのモチベーション向上に繋がりました。また懇親会には多くの参加者がおり、大変盛り上がりました。





第12回制御部門マルチシンポジウム
2025.3.2-2025.3.5 🡕
東谷 萌菜子
「ペンギンの歩行に着想を得た歩容の生成:状態フィードバック制御による姿勢安定化とステッピング動作の実現」
大阪駅の近くにある大阪工業大学梅田キャンパスで開催された第12回制御部門マルチシンポジウムに参加しました。学会の発表件数は281件で、制御理論や、プラントモデリング、適応学習など幅広い分野のテーマについて発表が行われました。学会では、口頭発表15分、質疑応答5分の計20分の発表を行いました。学会を通して、様々な質問や意見をいただくことができたため、今後の研究活動に活かしていきたいと思います。また学会発表以外にも、大阪の観光名所に行ったり、お好み焼きやたこ焼きを食べたりと充実した出張にすることができました。




第25回計測自動制御学会システムインテグレーション部門講演会(SI2024)
2025.12.18-2025.12.20 🡕
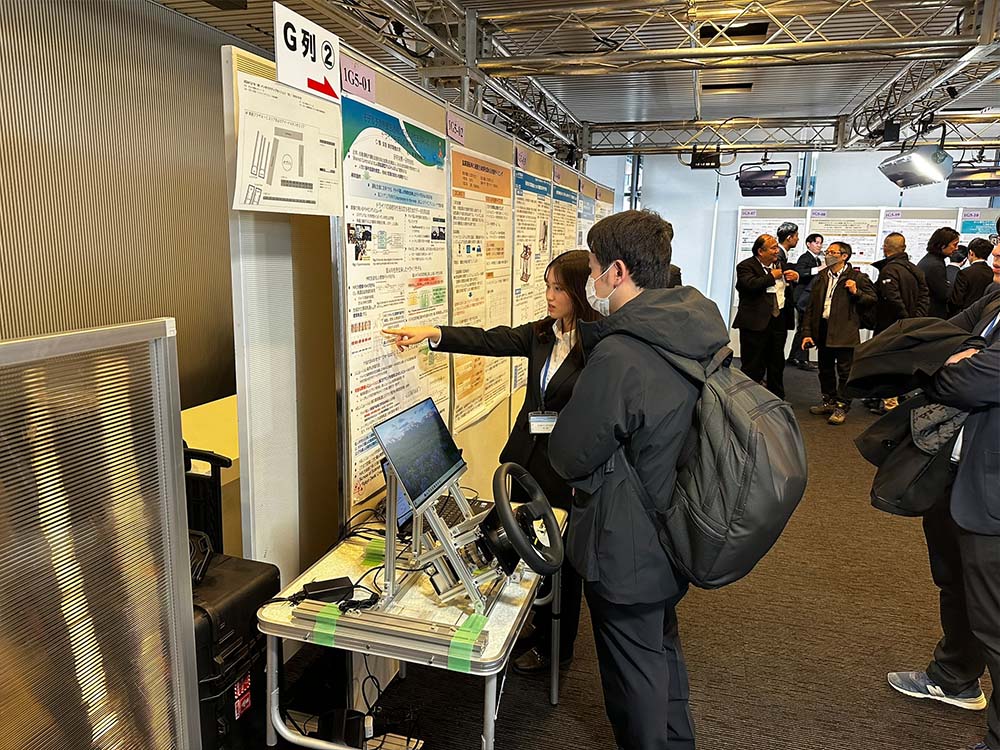
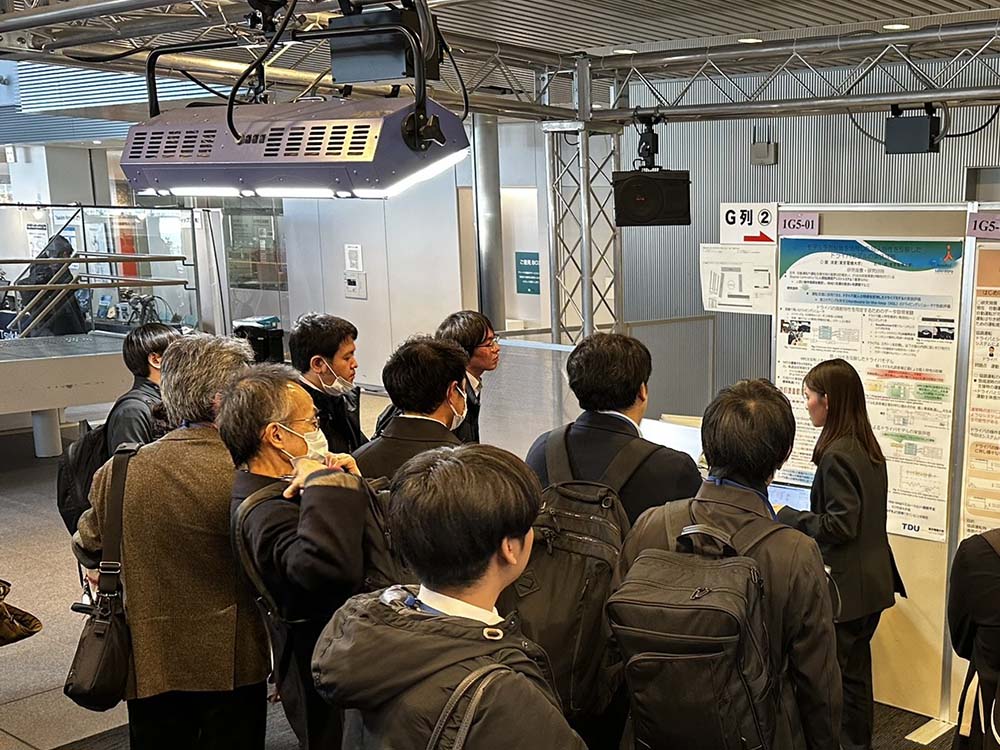
関 涼夏
「モデル予測制御を活用した個人特性を反映したドライバモデルの実装評価」
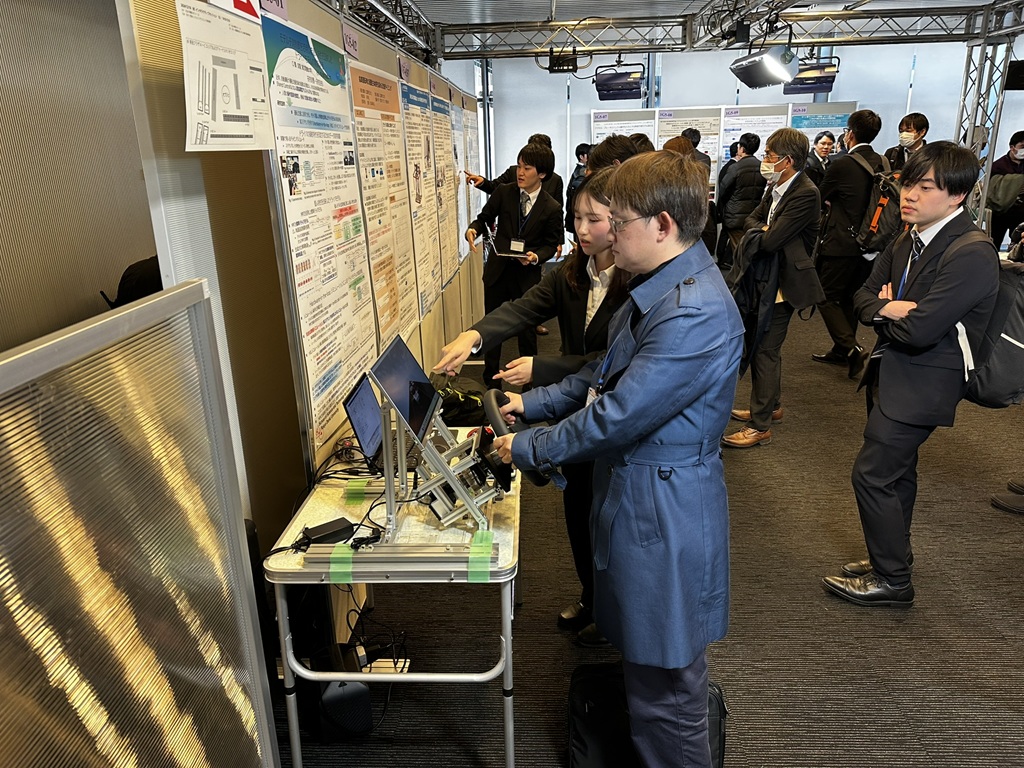
この学会は、「サステナブルな社会を目指すシステムインテグレーション」をテーマに1077件の発表、1600名以上の方々が参加しました。今回私は、ポスターセッションとして30分間のポスター発表を行いました。多くの方に興味をもっていただき、教授や学生、企業の方々と活発な意見交換を行うことができました。また、実機展示も行ったので、実際に実機での動きを見ていただき、「個人に特化した運転支援」についてより深い議論を行うことができ、今後の研究の足掛かりを得ることができました。さらに、懇親会では盛岡で有名なひっつみ汁やそばを楽しんだりなど、発表以外もとても充実した学会となりました。


2024 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2024)
2024.12.8-2024.12.14 🡕
東谷 萌菜子
「Toward Stable and Efficient Gait Inspired by Penguin Walking: Generation of Stable Stepping Motion」
タイのバンコクで開催された国際会議ROBIO2024に参加しました。この学会は、IEEEのロボット工学とバイオミメティクスの学際的分野の研究者が最新の研究成果を発表し、共同研究の可能性を探るためのプラットフォームとなる国際会議でした。採択件数は399件、学会参加者は約500名で、私は口頭発表で15分間の発表を行いました。初めての国際会議だったのでとても緊張しましたが、予想以上にたくさんの方に聞きに来てもらえて、有意義な議論ができました。懇親会では、海外の大学の方とも交流ができ、大変楽しい時間を過ごすことができました。また、仏閣寺院に行ったり、現地の料理を堪能したりなど、学会発表以外にも充実した出張となりました。




The 50th Annual Conference of the IEEE Industrial Electronics Society (IEEE IECON 2024)
2024.11.3-2024.11.6 🡕
関 涼夏
「Driver Steering Model Reflecting Personal Characteristics Utilizing Model Predictive Control」
アメリカ合衆国のシカゴで開催された国際会議IECON2024に参加しました。この学会は、パワーエレクトロニクス、電力システム、制御、製造、計算知能、通信に至るまで、現代の産業界のトピックに焦点を当てた第50回年次大会となる国際会議でした。採択件数は約1000件、学会参加者は約2000名で、私はインタラクティブテクニカルセッションで30分間のポスター発表を行いました。2回目の国際会議でしたが、現地の方の英語に圧倒されながらもなんとか無事に発表を終えることができ、有意義な議論ができました。懇親会では、他大学の方との交流ができたり、現地の料理を堪能したりなど、大変楽しい時間を過ごすことができました。また、美術館に行ったり、現地の風景を満喫したり、学会発表以外にも充実した出張となりました。今度は英語をもっと勉強し、より活発な議論ができるようになりたいです。




第42回日本ロボット学会学術講演会(RSJ2024))
2024.9.4-2024.9.6 🡕
市村 直樹
「同一物体の人間の共同操作を再現する機械的結合のない2台のロボットの協調制御」
大阪駅の横にある大阪工業大学梅田キャンパスで開催された第42回ロボット学会に参加してきました。この学会の発表数は802件,参加者は1663名であり,新たな社会基盤としてのロボット技術から,学術的可能性を探究するロボットサイエンスに至るまで,幅広い分野のテーマについて発表が行われました。今回の学会では,多くの人に話を聞いてもらうとともに様々な意見をいただくことができとても勉強になりました.この経験やいただいた意見を今後の研究活動に活かしていきたいと思います。





2024年電気学会産業応用部門大会(2024 IEE-JIASC)
2024.8.28-2024.8.30 🡕
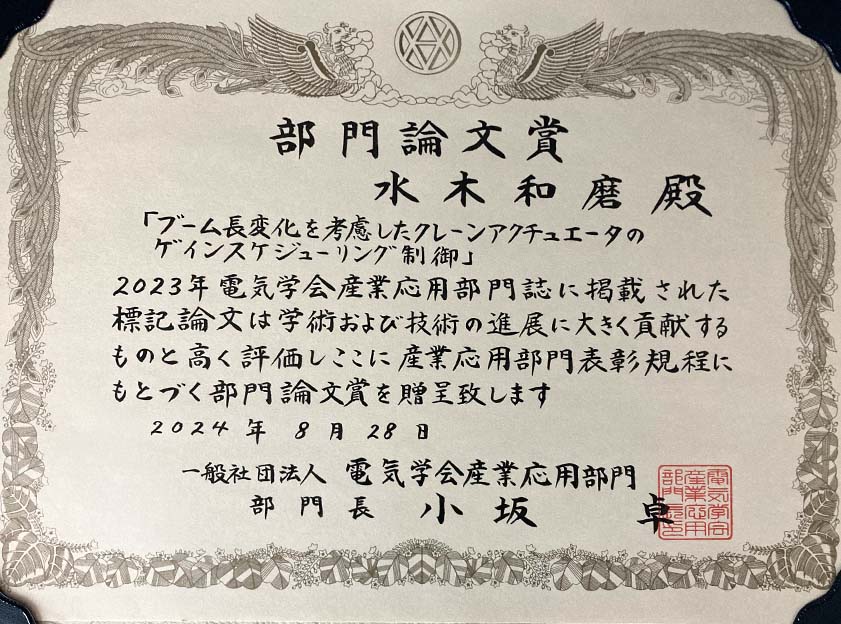
水木 和磨
「ブーム長変化を考慮したクレーンアクチュエータのゲインスケジューリング制御」
2024年産業応用部門論文賞受賞


2024年電気学会産業応用部門大会(2024 IEE-JIASC)
2024.8.28-2024.8.30 🡕
西山 優希
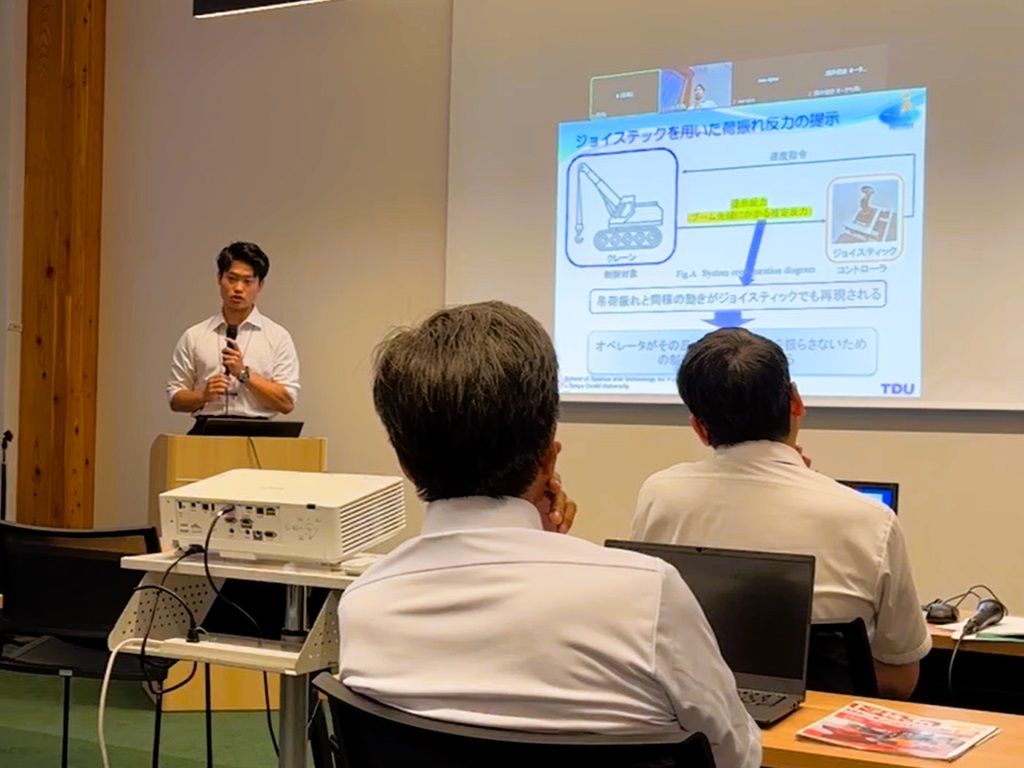
「吊荷振れ反力を提示するジョイスティックを用いたクレーン操作解析」
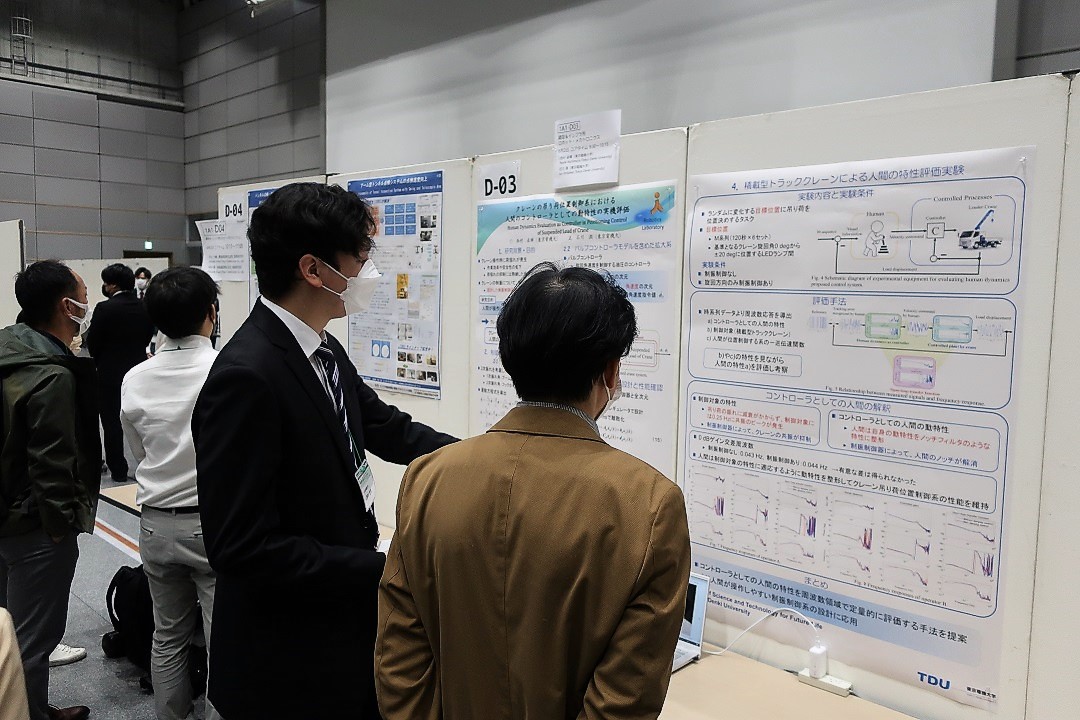
水戸市民会館で開催された学会に参加してきました。水戸名産の納豆にちなんで、「粘っていこう!水戸から発信、産業応用技術の未来」をテーマに、産業応用分野に関する507件の発表が行われ、1275名が現地で参加しました。口頭発表のほか、シンポジウムやポスターセッション、企業展示(主にパワーエレクトロニクス分野の技術製品の展示)もあり、非常に充実した学会でした。私は「産業計測制御(I)」というセッションで、吊荷振れ反力を提示するジョイスティックを用いたクレーン操作における、人間と機械の動作意図に関する研究内容を発表しました。質疑応答では、反力提示時の操作における予測操作に関する質問やコメントをいただき、今後の研究に活かせる貴重な知見を得ることができました。初めての学会での口頭発表だったため、15分という長めの発表時間に加え、学内発表とは異なる緊張感がありましたが、貴重な経験となりました。また、学会1日目に若手エンジニアの会、2日目の夜には懇親会に参加しました。特に懇親会では、茨城物産の常陸牛や地ビール、地酒が振る舞われただけでなく、「明和電機:社長」によるパフォーマンスも披露され、楽しくも有意義な時間を過ごすことができました。




日本機械学会 ロボティクス・メカトロニクス 講演会 2024 in Utsunomiya
2024.5.29-2024.6.1 🡕
関 涼夏
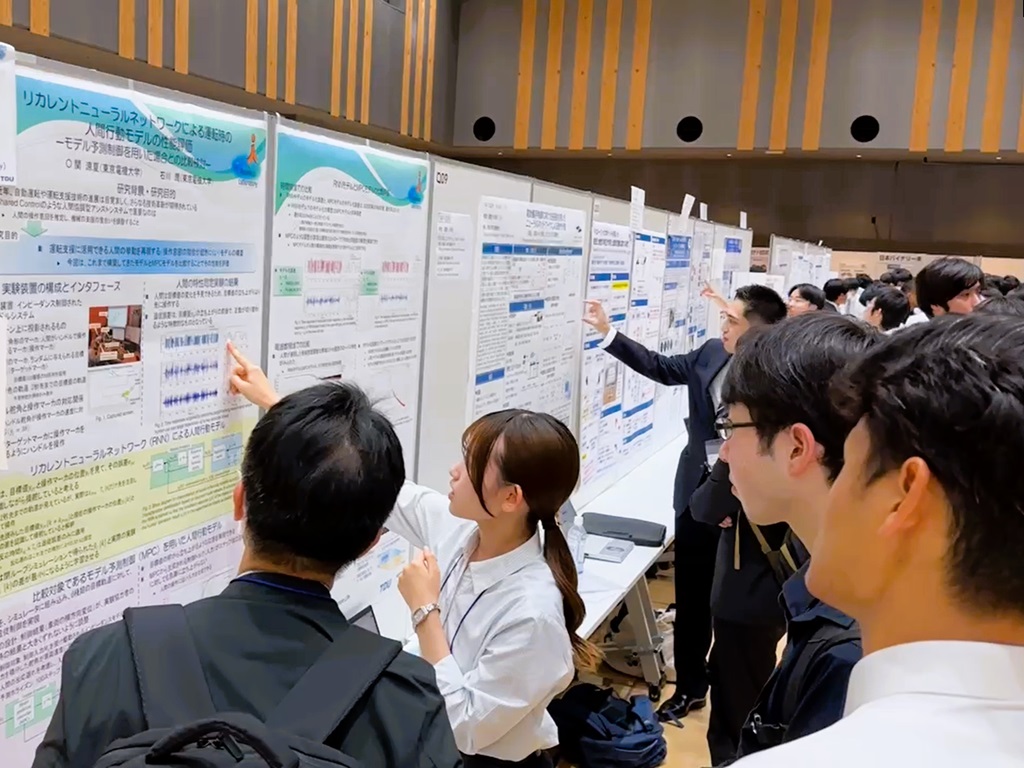
「リカレントニューラルネットワークによる運転時の人間行動モデルの性能評価―モデル予測制御を用いた場合との比較検討」
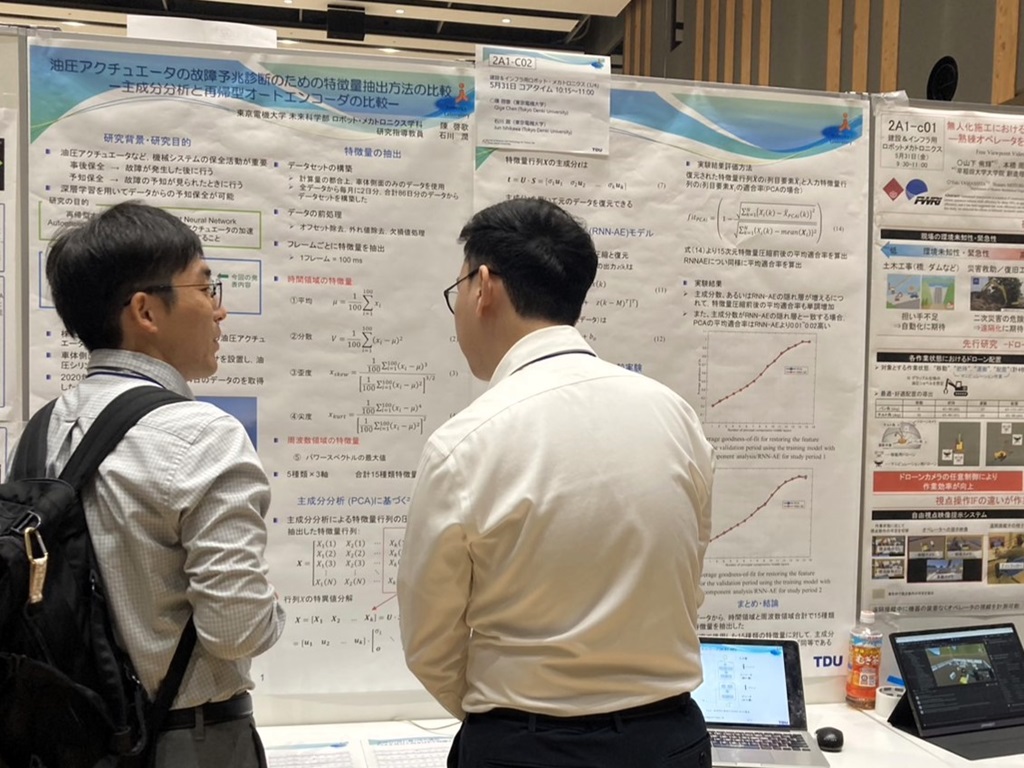
チン ケイカ
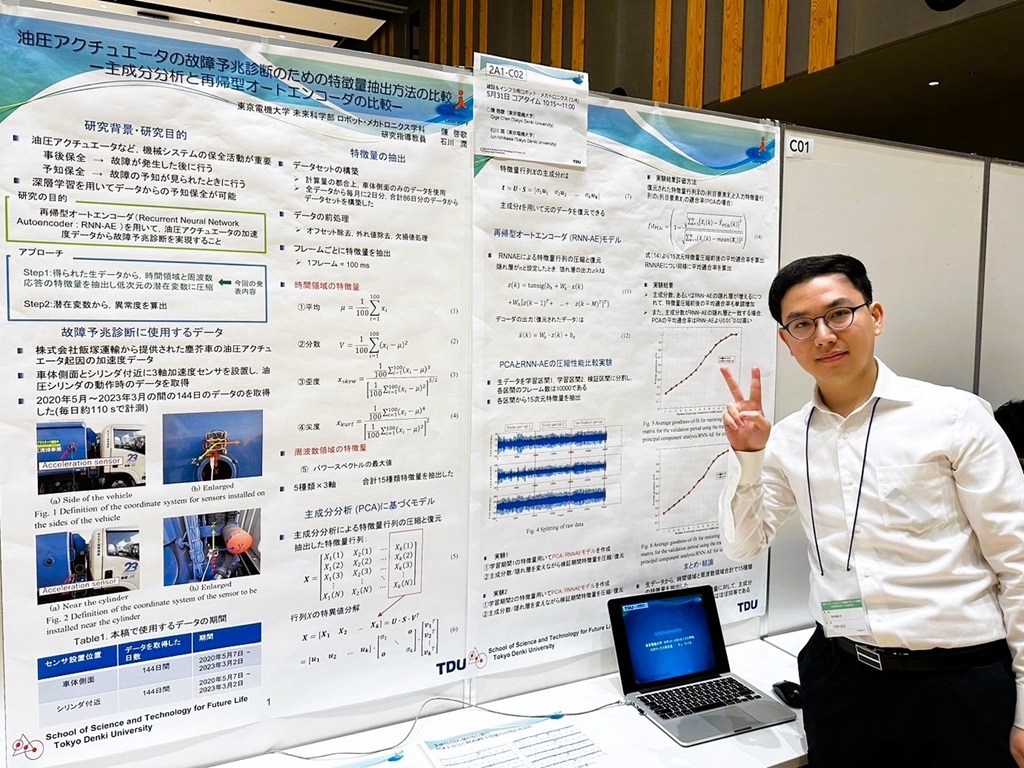
「油圧アクチュエータの故障予兆診断のための特徴量抽出方法の比較―主成分分析と再帰型オートエンコーダの比較」
この学会は、「ロボティクス・メカトロニクスの社会実装を通じた学術の深化」をテーマに1359件の発表、2,100名以上の方々が参加しました。今回は、ポスターセッションとして45分間のポスター発表を行いました。多くの方に聞きに来ていただき、教授や学生、企業の方々と活発な議論ができました。また、テクニカルツアーでは、本田技研工業にて、空力、衝突のCAEシミュレーションのVR体験ができたり、懇親会では宇都宮餃子の食べ比べやU字工事による余興を楽しんだりなど、発表以外もとても充実した学会となりました。


公益社団法人自動車技術会 2024年春季大会
2024.5.22-2024.5.24 🡕
関 涼夏
「リカレントニューラルネットワークに基づく運転時の人間行動モデルの汎用性評価」
本学会は、地球にやさしく、人にやさしいモビリティ社会の実現に向け、技術者や研究者が一丸となって課題を解決するための「場」の1つとして開催されている講演会です。私は、ドライバ状態のモニタリングというセッションで、これまで構築してきた運転支援に活用可能な人間の動きを推定するモデルの汎用性の評価結果について発表しました。企業の方がたくさん参加されており、実際に自動車の開発をされている方からも貴重なご意見をいただくことができました。また、学会期間中には、「人とくるまのテクノロジー展」が開催されており、実際に自動運転の車の中に入ることができたり、よりリアルな感覚で運転することのできるドライビングシミュレータを体験できたりなど、とても充実した学会となりました。


令和6年電気学会全国大会
2024.3.14-2024.3.16 🡕
阿部 太一
「二種類の障害物回避アルゴリズムを融合した移動ロボットの経路制御」
市瀬 瑠奈
「2ステージ機構を用いたバイラテラル制御の一構成法」
川村 健斗
「ドライバの意図に合わせてアシストポリシーを変更するShared Controlの一構成法」
田中 佑真
「2慣性系の負荷側加速度フィードバックに関する一考察」
徳島県徳島大学で開催された電気学会の全国大会に参加しました。1,159件の一般講演(口頭発表8分、質疑応答3分)をはじめ、シンポジウムや特別講演、企業展示会もあり内容盛りだくさんでした。初めての学会発表でしたが、会場の雰囲気もよく楽しめました。また、企業に所属している方々の一般講演も多く、企業同士の質疑応答には迫力がありました。開催地の徳島は渦潮が有名で、フェリーに乗り間近で見ることが出来ました。学会出張中は徳島の地鶏である阿波尾鶏や鳴門鯛など様々な食べものを楽しみました。




第24回計測自動制御学会システムインテグレーション部門講演会 SI2023 優秀講演賞
2023.12.15 🡕
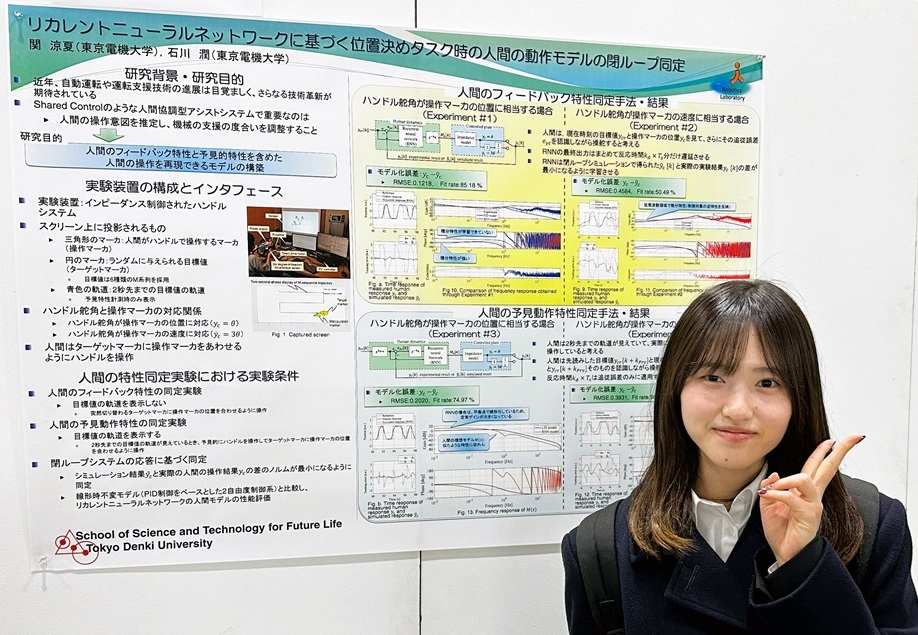
関 涼夏
「リカレントニューラルネットワークに基づく位置決めタスク時の人間の動作モデルの閉ループ同定」
この度SI2023にて優秀講演賞をいただいたこと、大変光栄に思います。指導教員をはじめ、本研究を進めるにあたり、多くの助言をくださいました研究室のメンバー、また、そばで支え、あたたかく見守ってくれた家族に心より感謝いたします。
この経験を糧に、大学院に進学後の2年間、より一層研究活動に精進してまいります。
西山 優希
「吊荷揺れ反力を提示する操作用ジョイスティックを用いたクレーンの吊荷制振制御」
この度SI2023にて優秀講演賞をいただき大変光栄に思います。この研究は企業様との共同研究であり、先輩方から脈々と受け継がれてきた研究です。今回の受賞は先輩方も含めた功績だと感じています。指導教員をはじめ、企業の方々、研究室のメンバー、支えてくれた家族にも感謝しています。
研究室では「人間適応型制振機能によるクレーン操作の支援システム」というテーマで研究を進めています。大学院に進学後の2年間も研究を加速させ、積極的に学会参加に挑戦したいと思います。クレーンの共同研究は私で最後になるので、今までの先輩方の築いてきた研究の集大成となる成果を出したいです。
第24回計測自動制御学会システムインテグレーション部門講演会(SICE SI2023)
2023.12.14-2023.12.16 🡕
関 涼夏
「リカレントニューラルネットワークに基づく位置決めタスク時の人間の動作モデルの閉ループ同定」
西山 優希
「吊荷揺れ反力を提示する操作用ジョイスティックを用いたクレーンの吊荷制振制御」
朱鷺メッセ新潟コンベンションセンターにて開催された学会に参加してきました。この学会は、人間・社会・人工物が関わる様々な分野における「技術革新に挑戦するシステムインテグレーション」をテーマとして、産官学の研究者・技術者が集結して当該分野に関連する講演発表が行われました。発表件数は1,064件、参加者は1,621名でした。今回は、インタラクティブセッションとして45分間のポスター発表を行いました。他大学の学生、教授や企業の方と気軽に意見交換が行え、有意義なアドバイスを頂くことができました。また、他大学の方の発表を拝見することで刺激をもらい、自身の研究に対するモチベーションも上がりました。学会の合間や終了後は現地の醤油ラーメンやお寿司も堪能することができました。


2023 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2023)
2023.12.4-2023.12.9 🡕
関 涼夏
「Closed-Loop Identification of Human Behavior in a Position Tracking Task Using Recurrent Neural Network」
タイのサムイ島で開催された国際会議ROBIO2023に参加しました。この学会は、IEEEのロボット工学とバイオミメティクスの学際的分野の研究者が最新の研究成果を発表し、共同研究の可能性を探るためのプラットフォームとなる国際会議でした。採択件数は377件、学会参加者はオンラインを含めて約380名で、私はポスターセッションで45分間の発表を行いました。初めての国際会議だったのでとても緊張しましたが、予想以上にたくさんの方に聞きに来てもらえて、有意義な議論ができました。懇親会では、他大学の方との交流ができたり、現地の料理を堪能したりなど、大変楽しい時間を過ごすことができました。また、仏閣寺院に行ったり、海を見に行ったりなど、学会発表以外にも充実した出張となりました。今度は口頭発表にも挑戦してみたいです。





2023年電気学会産業応用部門大会
2023.8.22-2023.8.24 🡕
関 涼夏
「運転支援システムのための人間の動作モデルの一構成法」
この学会では「進化するナゴヤで産業技術の神髄を」をテーマに573件の発表があり、1200名以上の現地参加がありました。口頭発表のほかにも、シンポジウムやポスターセッション、企業展示(自動車メーカの実車展示など)もあり、内容盛りだくさんの学会でした。私は、モーションコントロール(I)というセッションで、自動運転支援に活用可能な人間の動きを推定するモデルに関する研究内容を発表しました。質疑応答では目標軌道の与え方や人間動作の非線形性に関する質問やコメントをいただき、今後の研究に活かすことができる知見を得ることができました。初めての学会発表ということでとても緊張しましたが、貴重な経験となりました。またプレナリー講演では、名古屋市科学館のプラネタリウムに関して現地ならでは話も聴くことができました。学会2日目の夜には、懇親会があり、余興(今回は武将隊演舞でした)も4年ぶりに復活し、楽しくも有意義な時間を過ごすことができました。




日本機械学会ロボット・メカトロニクス講演会 2022(ROBOMECH 2022)ベストデモンストレーション表彰を受賞
2023.6.28-2023.7.1 🡕
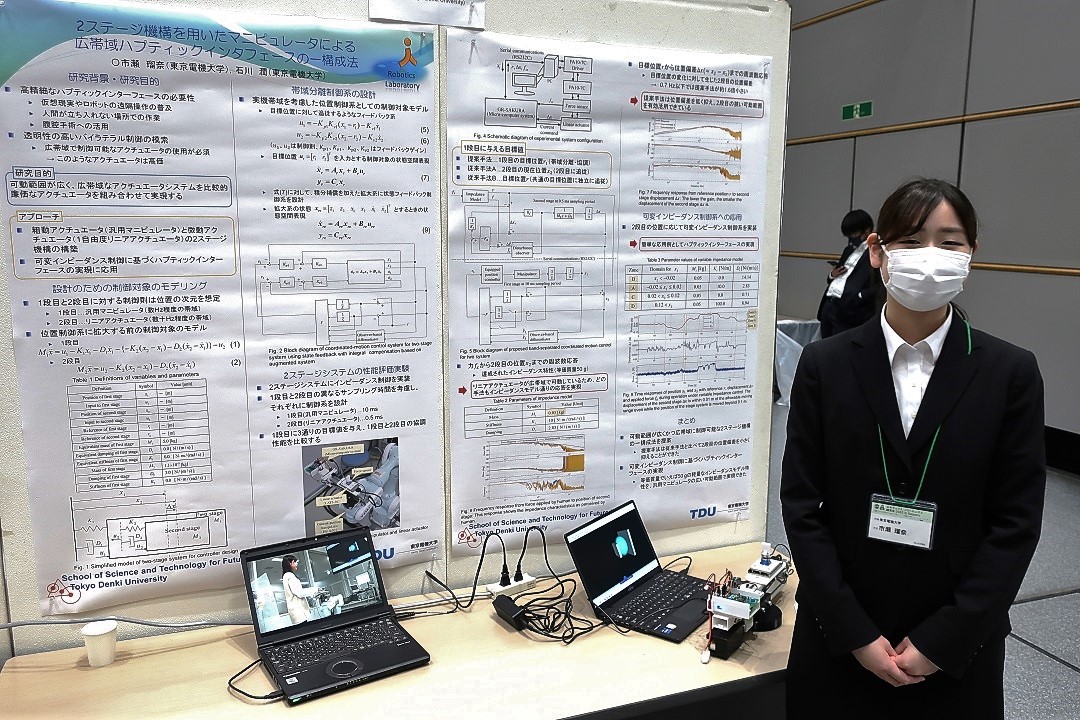
市瀬 瑠奈
「2ステージ機構を用いたマニピュレータによる広帯域ハプティックインタフェースの一構成法」
ROBOMECH 2022での研究発表が約1年の厳正な審査を経てベストデモンストレーション賞を頂くことができ、その表彰を2023年度の同学会で受けました。
大変光栄に思います。研究を始めた当初は自分が思い描いているように動くか不安でしたが、指導教員に導いていただき、今回受賞することができました。ご指導いただいた指導教員をはじめ、研究室のメンバーに心より感謝いたします。
私は今まで広可動範囲かつ高性能なハプティックインターフェースの研究を行ってきました。今回の受賞は自分のこれまでの研究が認められた喜びとともに、今後の活動の励みにもなりました。卒業までのあと半年、さらに研究を加速させていきたいと思います。
IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2023)
2023.6.27-2023.7.1 🡕
田中 佑真
「Validation of Feedforward Disturbance Cancellation for the PSS3 HDD Benchmark Problem for Dual Stage Actuators」
市村 直樹
「Predictive Assistive Motion Generation Based on Human Intent for Human-Collaborative Robots」
アメリカのワシントン州シアトルで開催された国際会議AIM2023に参加しました。この学会は、IEEEとアメリカ機械学会(ASME)の共催で、メカトロニクス分野で有名な国際会議の一つです。今回は,テクニカルセッションで15分の口頭発表を行いました。初めての国際学会で慣れない英語での発表だったのでとても緊張しました。英語での質疑応答も有りましたが,簡単な英語での質問だったので無事に終えることができました。シアトルは日本より北にあり,サマータイムを導入しているため,学会が終わる5時でも昼のように明るいため観光をたくさんすることができました。






令和5年電気学会全国大会(IEEJ2023)
2023.3.15-2023.3.17 🡕
武田 航平
「リカレントニューラルネットワークを用いたセントラル空調の消費電力推定」
吉川 怜央
「リカレントニューラルネットワークによるビル空調システムの設定温度決定手法」
名古屋大学東山キャンパスで開催された電気学会の全国大会に参加しました。1,180件の一般講演(口頭発表8分、質疑応答3分)をはじめ、シンポジウムや特別講演、企業展示会もあり内容盛りだくさんでした。コロナ禍もあり対面発表の学会が初めてでしたが、会場の雰囲気もよく楽しめました。また、企業に所属している方々の一般講演も多く、企業同士の質疑応答には迫力がありました。開催地の名古屋は特に食が豊富で、学会出張中は味噌カツやひつまぶしなど様々な食べものを楽しみました。






2023 IEEE/SICE International Symposium on System Integration(SICE SII2023)
2023.1.17-2023.1.20 🡕
清水 美穂
「Evaluation of Contribution Rate in Human-Robot Collaboration: A Study on Damping and Positioning Control of Suspended Load」
市瀬 瑠奈
「A Wide Bandwidth Haptic Interface Using Manipulator with Two-Stage Mechanism」
米国ジョージア州アトランタで開催された国際会議SII2023に参加しました。この学会は、IEEEと計測自動制御学会 (SICE) の共催でシステムインテグレーション分野で有名な国際会議の一つです。今回は、テクニカルセッションで15分間の口頭発表を行いました。発表はとても緊張して、英語での質疑応答も大変でしたが、何とか終えることができました。夕食会では、同じ学会に参加した他大学の先生方と交流する貴重な経験をすることができました。また、アトランタの有名な観光スポットであるワールド・オブ・コカコーラやジョージア水族館にも行くことができ、学会発表以外にも充実した出張でした。





第23回計測自動制御学会システムインテグレーション部門講演会(SICE SI2022)
2022.12.14-2022.12.16 🡕
市瀬 瑠奈
「2ステージ機構を用いた広可動域・広帯域制御系のハプティックインタフェースへの応用」★優秀講演賞
市村 直樹
「人間の意図に基づく人協働ロボットの能動的支援動作」
茂木 美玲
「市販のセンサを用いたリカレントニューラルネットワークによるにおい識別」
カン エン ヤン
「直列弾性アクチュエータの剛性と負荷側質量の位置決め性能に関する一考察」
幕張メッセの横にある国際会議場で開催された学会に参加してきました。この学会は、「高機能化・複雑化するシステムの諸問題を解決し、更にシステムの設計論を開拓・構築するための、人間・社会・人工物が関わる様々な分野における俯瞰的システムインテグレーション」をテーマに発表が行われました。今回初めて学会に参加する人、学会発表経験がある人など様々でしたが、多くの人に話を聞いてもらうとともに様々な意見をいただくことができ、とても勉強になりました。この経験やいただいた意見を今後の研究活動に活かしていきたいと思います。

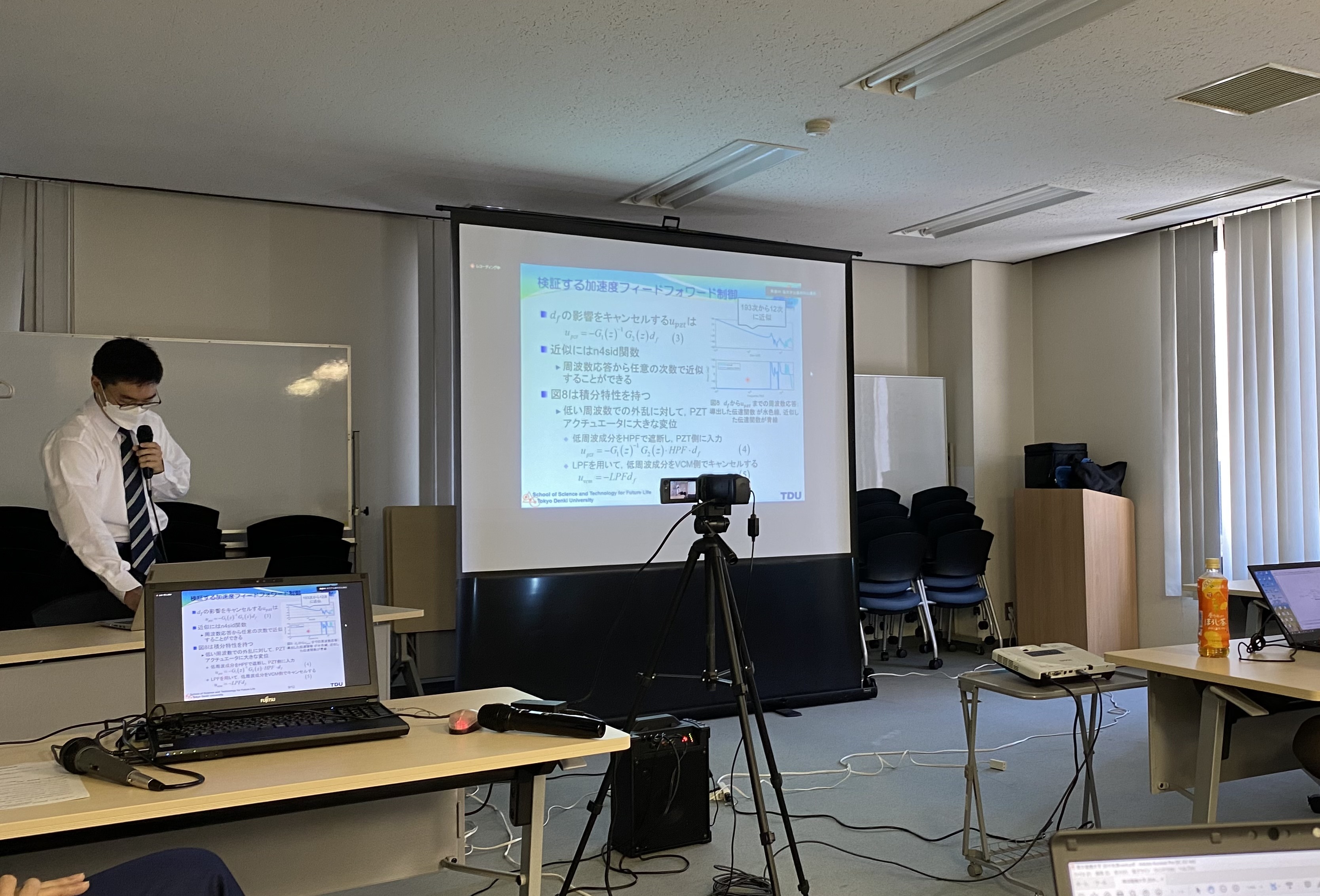
メカトロニクス制御研究会
2022.9.26 🡕
田中 佑真
「デュアルステージアクチュエータのためのPSS3磁気ディスク装置ベンチマーク問題に対する外乱フィードフォワード制御の検証」
電気学会 産業応用部門 メカトロニクス制御技術委員会に参加しました。この学会は現地とオンラインのハイブリッド形式での開催でした。今回は10分の発表と5分間の質疑応答でした。また、通常の学会と異なり研究会という括りのため専門の先生からのご指摘をいただく機会がありました。学会は初めてのことで大変緊張しましたが他者の発表や鋭い指摘を頂けた大変有意義なディスカッションをすることができました。
日本機械学会 ロボティクス・メカトロニクス 講演会 2022 in Sapporo
2022.6.1-2022.6.4 🡕
西村 直輝
「クレーン吊り荷位置制御系における人間のコントローラとしての動特性の実機評価」
市瀬 瑠奈
「2ステージ機構を用いたマニピュレータによる広帯域ハプティックインタフェースの一構成法」
この学会は、「ニューノーマル時代を切り拓くロボティクス・メカトロニクス」をテーマに1209件の発表、1585名の方々が参加しました。会場は札幌市内の施設であり、北海道の広大な土地と多くの歴史的な建造物を目の当たりにしました。会場でのポスター講演とオンラインツールでのオンライン講演のハイブリッド形式の開催となりました。今回は、ポスターセッションとして45分間のポスター発表を行いました。多くの方にポスターを見ていただき、意見交換など有意義なディスカッションができました。また、他者の発表を拝見することもでき、知見を広げることができました。頂いたアドバイスや発表した経験を今後の研究に活かしていきたいと思います。


2022 IEEE 17th International Conference on Advanced Motion Control (AMC2022)
2022.2.18-2022.2.20 🡕
清水 美穂
「Operability Improvement of Human-Robot Collaboration by Human-Adaptive Impedance Control Based on Human Arm Stiffness Estimation」
イタリアのパドヴァで開催された国際会議AMC2022に参加しました。今回はオンラインでの開催でした。この学会はIEEEの産業用電子学会が主催する、高度なモーションコントロールに関する国際会議で、普遍的なモーションコントロール技術とアプリケーションを促進することを目的としています。今回はスライドによる10分間の発表と5分間の質疑応答でした。質疑応答では、英語が難しく答えることができなかったので、もっと英語を勉強する必要があると感じました。
第22回計測自動制御学会システムインテグレーション部門講演会(SICE SI2021)
2021.12.15-2021.12.17 🡕
八田 雄太
「ホッピングロボットの踏切時における安定性向上に関する一考察」
吉田 瑞規
「位相進み補償器を用いた機械インピーダンス制御系の安定性改善」
新型コロナウイルスの影響により、昨年に引き続きオンライン開催となった計測自動制御学会SI2021に参加しました。本学会はオンラインながら1319名の方々が参加しました。「激変する時代に立ち向かうシステムインテグレーション」というテーマで、oViceによる1時間の質疑応答でセッションが構成されました。発表者は両者とも初めて学会に参加したので、とても緊張しました。oViceでの質疑応答では疑似対面形式として有効であると同時に、質問者の表情が分かりにくいといった使いにくさもありました。しかし、多くの研究者と気軽に意見交換が行え、有意義なアドバイスを頂くことができました。また、他大学の方の講演や発表を聴講することもでき、大変充実した時間を過ごせました。開催予定だった鹿児島に行くことができず残念でしたが、学会に参加できたことはとても貴重な経験でした。

令和3年度空気調和・衛生工学会大会(福島)
2021.9.15-2021.9.17 🡕
武田 航平
「リカレントニューラルネットワークを用いた消費電力推定 ― 外挿性能の改善に向けて ―」
今年度は、新型コロナウイルス感染症の影響により現地開催が中止となり、Zoomを利用した大会となりました。学術講演は、オンデマンドで10分間の講演動画を配信、当日はリアルタイムで2分間の講演と5分間の質疑で構成されていました。質疑では活発にされていた議論を聞くと、現場に実装するために必要なリアルな仕様の話まで知ることができ、有意義な時間を過ごせました。また、参加者としても事前にオンデマンドの動画を視聴することで、聴講したいセッションを選択しやすく、講演を聞きやすかったです。自身の研究に近い発表が多数あったため参考にして、来年も参加したいです。


2021年電気学会産業応用部門大会
2021.8.25-2021.8.27 🡕
清水 美穂
「人とロボットの制振作業を伴う協働に関する一考察」
この学会は、「長岡から醸せ!産業と技術革新の基盤」をテーマに505件の発表があり、聴講参加者は全体で528名、そのうち200名以上が現地参加でした。私も2度のワクチン接種を済ませ、感染対策も万全に現地で発表してきました。学会のオープニングセレモニーには長岡市長も出席して祝辞を述べていただくなど、現地開催を無事に成功させたいという一丸となった思いが伝わる開会でした。私は、モーションコントロール(I)というセッションで、人とロボットの協働作業に関する研究内容を発表し、質疑応答では制御対象のモデリングについても議論でき、今後の研究に活かすことができる知見を得ることができました。初めての対面での学会発表ということでとても緊張しましたが、聴講者の方と顔を合わせて発表するなど貴重な経験となりました。モーションコントロールのセッションでは、自分と同じ人協働ロボットの研究など興味深い発表を聴くことができました。またプレナリー講演では、日本酒に関する話など現地ならでは話も聴くことができました。オンラインの学会ばかりだったので、今回現地で学会に参加し、学会本来の人との交流もできたのは有意義でした。




日本機械学会ロボティクス・メカトロニクス講演会 2021 in Osaka
2021.6.6-2021.6.8 🡕
塚田 智勇
「リカレントニューラルネットワーク逆動力学モデルに基づく外乱オブザーバの一構成法」
清水 美穂
「人協働ロボットの操作性および安定性を改善するための人間適応型インピーダンス制御」
田中 知晃
「出力零化制御によるホッピングロボットの姿勢制御」
この学会は、「ニューノーマル時代を切り拓くロボティクス・メカトロニクス」をテーマに1209件の発表、1585名の方々が参加しました。会場は札幌市内の施設であり、北海道の広大な土地と多くの歴史的な建造物を目の当たりにしました。会場でのポスター講演とオンラインツールでのオンライン講演のハイブリッド形式の開催となりました。今回は、ポスターセッションとして45分間のポスター発表を行いました。多くの方にポスターを見ていただき、意見交換など有意義なディスカッションができました。また、他者の発表を拝見することもでき、知見を広げることができました。頂いたアドバイスや発表した経験を今後の研究に活かしていきたいと思います。


第21回計測自動制御学会システムインテグレーション部門講演会(SICE SI2020)
2020.12.16-2020.12.18 🡕
花房 美咲
「人協働ロボットのための人間適応型インピーダンス制御の操作性評価」
清水 美穂
「人協働ロボットのための人間適応型インピーダンス制御」★優秀講演賞
西村 直輝
「人間が操作しやすいクレーン吊り荷制御系の開発」
新型コロナウイルスの影響により、初めてのオンライン開催となった、計測自動制御学会SI2020に参加しました。本学会はオンラインながら1163名の方々が参加しました。「イノベーションを加速するシステムインテグレーション」というテーマで、Zoomによる3分間の発表と、Slackによる1時間の質疑応答でセッションが構成されました。学部4年生は初めての学会参加でとても緊張しましたが、Slackでの質疑応答では、オンラインならではの便利さがあり、多くの研究者と気軽に意見交換が行え、有意義なアドバイスを頂くことができました。他大学の方の講演や発表を聴講することもでき、大変ためになりました。開催予定だった博多に行くことができず残念でしたが、学会に参加できたことはとても貴重な経験でした。また、清水が学会の優秀講演賞を受賞しました。





日本機械学会 ロボティクス・メカトロニクス 講演会 2020 in Kanazawa
2020.5.27-2020.5.29 🡕
花房 美咲
「リカレントニューラルネットワークを用いた協働ロボットの人間適応型インピーダンス制御」
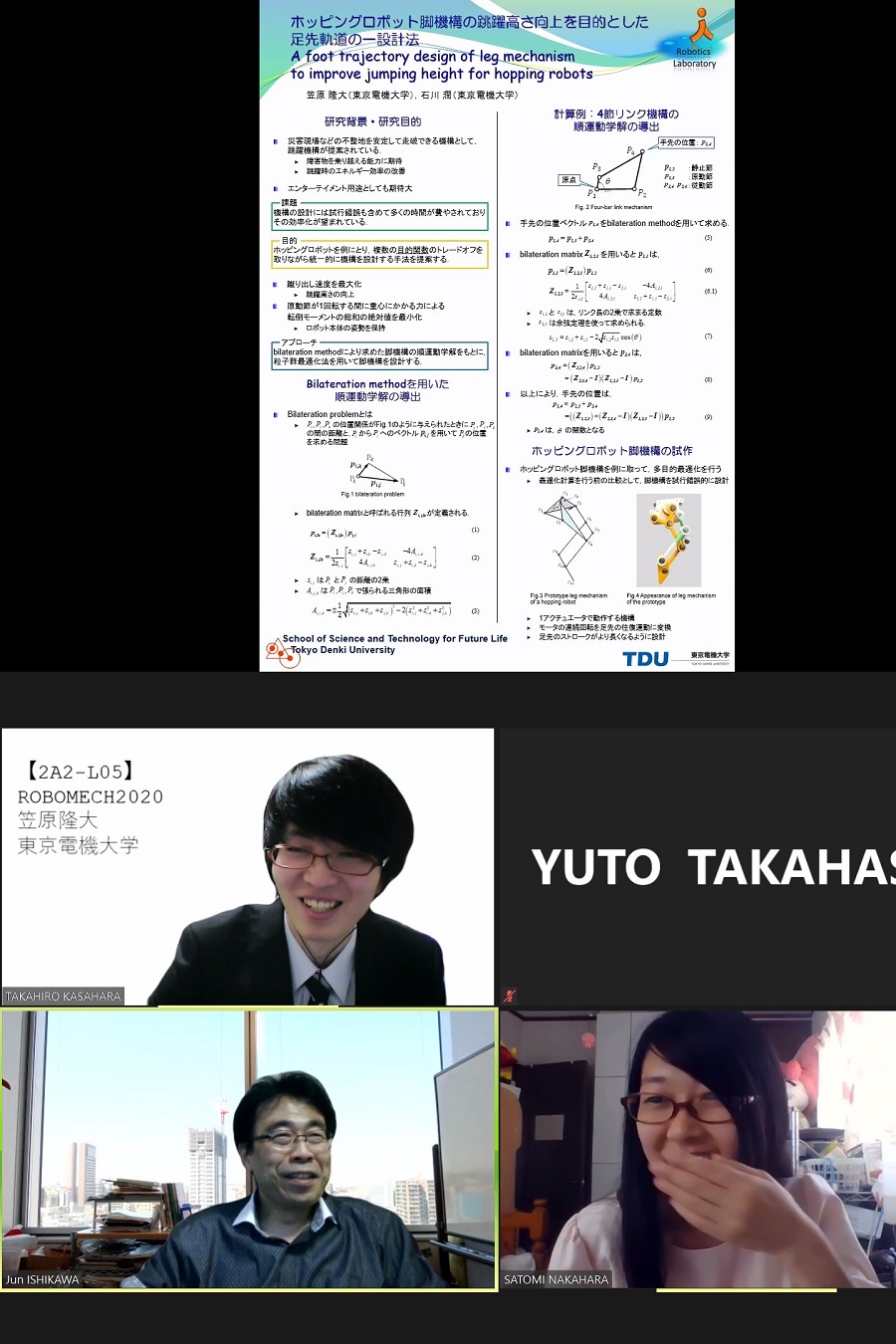
笠原 隆大
「ホッピングロボット脚機構の跳躍高さ向上を目的とした足先軌道の一設計法」
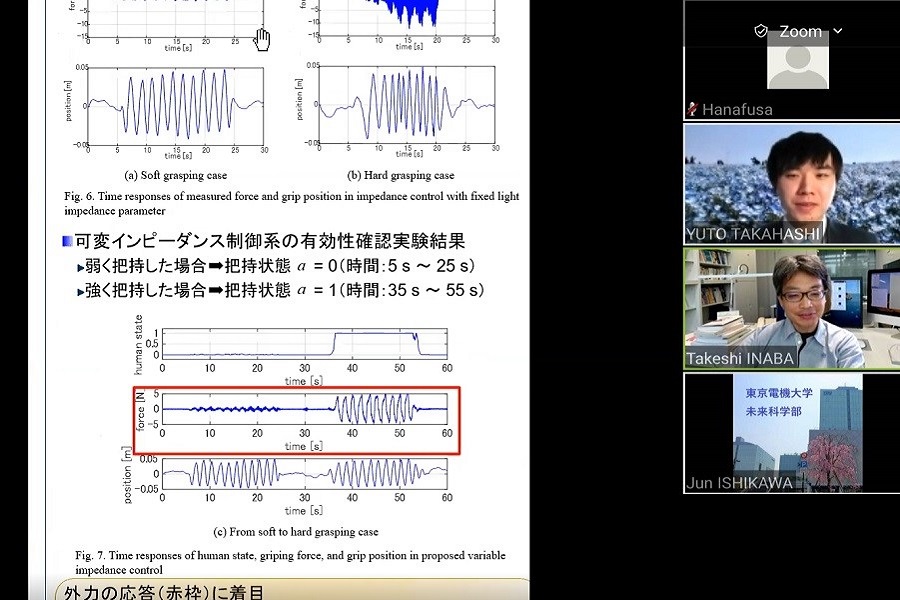
高橋 優斗
「人間の把持状態に応じた可変インピーダンス制御」
この学会は、「異分野融合を加速させるロボティクス・メカトロニクス」をテーマに1,319件の発表、1,711名の方々が参加しました。今年は、新型コロナウイルスの影響により、日本機械学会(JSME)にとって初めてのオンライン開催となりました。今回は、FaceBookを使用したポスターセッションとして45分間のポスター発表を行いました。FaceBookの使い方に戸惑いはありましたが、多くの方にポスターを見ていただき、有意義なコメントやアドバイスを頂くことができました。頂いたアドバイスや発表した経験を今後の研究に活かしていきたいと思います。オンライン開催となり、現地でのイベント等を楽しめなかったのは残念ですが、初めてのオンライン学会に参加できたので、貴重な体験になりました。

2020 IEEE/SICE International Symposium on System Integration (SICE SII2020)
2020.1.12-2020.1.15 🡕
花房 美咲
「A Practical Method for Acquiring Inverse Dynamics Model and Its Application to Mechanical Impedance Control of Human-Cooperative Robot」
町田 悠輔
「Power Consumption Estimation for Building Air Conditioning Systems Using Recurrent Neural Network」
米国ハワイ州ホノルルで開催された国際会議SII2020に参加しました。この学会は、IEEEと計測自動制御学会 (SICE) の共催でシステムインテグレーション分野で有名な国際会議の一つです。今回は、テクニカルセッションとして15分間の口頭発表を行いました。質疑応答では、英語でのコミュニケーションの難しさを感じましたが、無事終えることができました。懇親会では、ウクレレの演奏に加えて、迫力のあるファイヤーダンスを鑑賞しました。ホノルルの街は日本語表記が多く、日本人向けの観光地という印象を受けました。ハンバーガーやパンケーキなどハワイで人気の料理も堪能し、充実した出張となりました。





第20回計測自動制御学会システムインテグレーション部門講演会(SICE SI2019)
2019.12.12-2019.12.14 🡕
渡邊 健太
「積載形トラッククレーンのブームのたわみを考慮した吊り荷制振制御」
安倍 魁都
「非線形特性を有する直列剛性を搭載したSeries Elastic Actuator の性能評価」
杉内 佑輔
「畳み込みニューラルネットワークによる環境認識に基づくドローンの飛行制御」
土屋 裕人
「視触覚一致効果に基づく身体拡張システムの一体感評価」
根本 大輝
「可変機械インピーダンス制御を用いたバイラテラル制御の操作性解析」
花房 美咲
「リカレントニューラルネットワークを用いた外力推定に基づく機械インピーダンス制御の一構成法」★優秀講演賞
町田 悠輔
「リカレントニューラルネットワークによるビル空調システムの年間消費電力の推定」
うどん県香川で開催された学会に参加してきました。この学会は、「安全・安心・幸福を創造するシステムインテグレーション」をテーマに847件の発表が行われました。今回初めて学会に参加する人、学会発表経験がある人など様々でしたが、どの発表も多くの人に話を聞いてもらい、色々な意見を頂き、とても勉強になりました。この経験を今後の研究に活かしていきたいと思います。また、香川といえばうどんが有名だと思いますが、それ以外にも骨付き鳥やオリーブ牛などの美味しいもの、直島や金比羅山などの観光名所がたくさんあり、とても楽しめました。



The 9th IEEE International Conferences on CIS & RAM
2019.11.18-2019.11.20 🡕
花房 美咲
「Mechanical Impedance Control of Cooperative Robot during Object Manipulation Based on External Force Estimation Using Recurrent Neural Network」
タイ王国のバンコクで開催された国際会議CIS &RAM2019に参加しました。この学会は、IEEEのサイバネティクス関係の部門(CIS)とロボット関係の部門(RAM)が共催する、学際色の強い会議です。2年に1回の開催ペースなので、20年近い歴史があります。私は、リカレントニューラルネットワーク外力推定器を人間協働ロボットのインピーダンス制御に応用する研究成果を発表してきました。並行するセッション数が3という規模は国際会議としては大きいものではありませんが、その分、密度の濃い議論をすることができる会議でした。バンコクは、以前に学会出張した香港に劣らず夜景がきれいで、60階のビルの屋上から眺める景色は壮観でした。猫好きの私としては、世界遺産アユタヤを訪問したときに、トラと触れ合うことができたのは感激でした。きれいな寺院を巡ったり、英語の実践ということで初めて外国でネイルに挑戦したり、学会で忙しいながらも、観光も充実した出張でした。





IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2019)
2019.11.4-2019.11.8 🡕
花房 美咲
「External Force Estimation of Human-Cooperative Robot during Object Manipulation Using Recurrent Neural Network」
マカオで開催された国際会議IROS2019に参加しました。この学会は、IEEEと日本ロボット学会(RSJ)の共催で、ロボット分野では最も大きな会議のひとつであり、今回は約3,500名の参加がありました。私はポスターセッションで、人間協働ロボットに重要な物体操作中に加わる外力を推定するリカレントニューラルネットワークについての研究成果を発表してきました。ポスターセッションだったので、時間をかけてじっくりと研究についての議論、意見交換ができました。この学会は企業の展示も充実していて、様々なロボットの動態展示を見ることができました。学会会場は、カジノも併設される大きなホテルで、ホテル内には道化師などがいて雰囲気を盛り上げていました。ロボット応用の実践!?ということで、産業用マニピュレータの先端に乗って振り回されるVRを体験しましたが、なかなか新鮮でした。観光では、150円の入館料で1時間パンダを見学できる施設などを訪問し、学会以外の活動も充実していました。




IEEE SMC 2019
2019.10.6-2019.10.9 🡕
佐藤 泰彦
「Contact force estimation based on fingertip image and application to human machine interface」
初めての国際学会参加であり緊張しましたが、しっかり発表することができました。この学会参加を通して得られた知見や経験を今後の研究活動に活かしていこうと思います。






IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2019)
2019.7.8-2019.7.12 🡕
花房 美咲
「External Force Estimation for Nonlinear Systems Using Recurrent Neural Network」
香港の香港サイエンスパークで開催された国際会議AIM2019に参加しました。この学会は、IEEEとアメリカ機械学会(ASME)の共催で、メカトロニクス分野で有名な国際会議の一つです。私は” Identification and Estimation”というセッションでリカレントニューラルネットワークを用いた外力推定器についての研究成果を発表してきました。質疑応答では、リカレントニューラルネットワークの安定性についての質問を受け、有意義な議論ができました。また、プレナリートークやテクニカルツアーを通して、ロボットに関する最新の研究動向を知ることができました。観光も、夜景を見たり、パワースポット黄大仙祠(ウォンタイシン寺)やディズニーランドを訪ねたりなど充実した出張でした。




ロボティクス・メカトロニクス 講演会 2019 in Hiroshima
2019.6.6-2019.6.8 🡕
渡邊 健太
「ブーム長変動など考慮したクレーンのつり荷制振制御系のロバスト性解析」
花房 美咲
「リカレントニューラルネットワークを用いた人間協働ロボットのための外力推定-6 自由度物体操作時の評価-」
町田 悠輔
「リカレントニューラルネットワークによるビル空調システムの消費電力推定-予測に向けた特徴ベクトルの選定-」
佐藤 泰彦
「指先画像に基づいた接触力推定とヒューマンインターフェースへの応用」
この学会は、「産業を再興するロボティクス・メカトロニクス」をテーマに1326件の発表、約2100名の方々が参加しました。会場は平和記念公園内にあり、厳島神社も1時間ほどの距離に位置し、歴史と文化を身近に感じてきました。今回は、ポスターセッションとして45分間のポスター発表を行いました。多くの方にポスターを見ていただき、有意義なディスカッションができました。頂いたアドバイスや発表した経験を今後の研究に活かしていきたいと思います。懇親会では近大マグロの解体ショーがあり、迫力満点の解体のあと、握り寿司としておいしく頂きました。





The 20th IEEE International Conference on Industrial Technology
2019.2.13-2019.2.15 🡕
渡邊 健太
「Damping control of suspended load in consideration of boom deflection」
2回目の国際会議で、オーラルセッションで発表しました。発表は前回より緊張せず、無事発表を行うことができました。しかし、英語はまだまだでもっと勉強していかなければいけないと改めて実感しました。この経験を生かして今後も努力していきたいと考えています。メルボルンはとても過ごしやすく、料理もおいしく、良い街でした。


第19回計測自動制御学会システムインテグレーション部門講演会(SI2018)
2018.12.13-2019.12.15 🡕
澤井 利貴雄
「筋電位を用いた指角度推定のためのリカレントニューラルネットワークの一特徴抽出法」
安倍 魁都
「Series Elastic Actuatorの直列剛性が位置制御系および力制御系の性能に与える影響について」
花房 美咲
「リカレントニューラルネットワークによる非線形システムの外力推定」
スポットライトセッションで3分間の口頭発表をしたあとに、インタラクティブセッションとして45分間のポスター発表を行いました。スポットライトセッションの発表を聴いて興味を持ってくれた人が多くポスターを見に来てくれて、有意義なディスカッションができ、今後の研究を進めていくうえで貴重な機会となりました。

Annual Conference of the IEEE Industrial Electronics Society
2018.10.21-2018.10.23 🡕
渡邊 健太
「Damping Control of Suspended Load for Truck Cranes in Consideration of Second Bending Mode Oscillation」
今回、国際学会初参加で、オーラルセッションで発表しました。発表当日はとても緊張しましたが、無事発表を行うことができました。今回、国際学会に参加したことで、英語の必要性を改めて感じました。また、同じ分野の研究についても知ることができました。この経験を生かして今後も努力していきたいと考えています。


The 5th International Conference on Advanced Engineering – Theory and Applications 2018
2018.9.11-2018.9.13 🡕
オン チャシン
「Attitude Control of Jumping Robot with Bending-Stretching Mechanism」
初めての国際学会で緊張しましたが、英語で発表することができて、異なる分野での研究についても知ることができ、とても貴重な経験になりました。
山田 紫萌野
「Nonlinear Disturbance Observer with Recurrent Neural Network Compensator」
オーラルセッションは初めてで緊張しましたが、普段とは異なる環境に接することができ非常に有意義でした。




The 7th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics
2018.8.26-2018.8.29 🡕
野村 友理香
「Attitude Control for Underactuated Hopping Robots Using Nonlinear Output Zeroing Controller」
海外で2回目のポスター形式での発表でした。前回よりは英語で説明できたと思います。少し分野が違う気がしましたが、生物模倣に関しての知識を得ることができました。初のヨーロッパ、楽しかったです。



ロボティクス・メカトロニクス 講演会2018 in Kitakyusyu
2018.6.2-2018.6.5 🡕
野村 友理香
「アームを用いたホッピングロボットの空中姿勢制御 ― 倒立振子モデルによる基本制御性能の検証 ―」
昨年と同様に、ポスター形式で発表しました。発表当日は多くの方々に説明することができました。また、私と同じ分野の方々の研究についても知ることができました。この経験を今後の研究に活かしていけるように頑張ります。
朴木 瞳
「リカレントニューラルネットワークによるビル空調システムの消費電力推定」
昨年のROBOMECHとは研究テーマを変えてポスター発表をしてきました。このテーマでの学会は初めてだったので緊張しましたが、貴重な意見をいただけて良かったです。その意見を研究に取り入れ、より良い成果を出していきたいです。
オン チャシン
「屈伸機構を持つ跳躍ロボットの姿勢制御」
ポスター形式で発表し、研究に関してコメントとアドバイスを頂けました。また、他の参加者の発表も聞くことができ、様々な分野での研究について知ることもできました。この経験を今後の研究に活かしていきます。
渡邊 健太
「ブームのたわみを考慮したクレーン吊り荷の制振制御」
今回が学会初参加で、ポスター形式で発表しました。発表当日はとても緊張しましたが、多くの人に研究内容を聞いて頂き、アドバイスも頂きました。また、同じ分野の研究についても知ることができました。頂いたアドバイスや発表した経験を今後の研究に活かしていけるように頑張ります。

計測自動制御学会システムインテグレーション部門講演会
2017.12.20-2017.12.22 🡕
澤井 利貴雄
「アレイ型筋電センサを用いたリカレントニューラルネットワークによる筋電義手の制御」
山田 紫萌野
「リカレントニューラルネットワークに基づく建設機械の動作モデルの一構成法」
計測自動制御学会システムインテグレーション部門講演会ではスポットライトセッション+ポスター発表を行いました。ポスター発表だったので、たくさんの方から意見を頂き、とても勉強のなりました。今回が初めての学会でしたが、とても貴重な経験になりました。


AETA2017
2017.12.7-2017.12.9 🡕
石原 大知
「Reference Trajectory Generation of Laser Beam in Consideration of Response Speed of Laser Processing Machine」
エンジニアリングにおける理論と応用をテーマとした国際学会に参加した。発表者88名(うち外国人研究者71名)、採択率約60%であった。私が参加したセッションはControl Systemsというセッションで、制御技術に関する発表が行われた。学会を通して、最新の制御技術について理解を深めることができた。
清水 崇一朗
「Performance Evaluation of Grasping Force Control Based on Fall Velocity Control of Grasping Object for Telemanipulation Systems」
初めての国際学会ということで、発表前は不安や緊張でいっぱいでしたが、発表後には参加者の方々に興味を持っていただき、多くの意見やコメントをいただくことができました。この貴重な経験をもとに、今後も様々なことに挑戦していきたいと思います。
吉川 真実
「Damping Control of Suspended Load for Truck Cranes in Consideration of Control Input Dimension」
初めての国際会議への参加で緊張しました。慣れない英語での発表や現地でのコミュニケーションは貴重な経験になりました。
野村 友理香
「Aerial Attitude Control of Hopping Robots Using Reaction Wheels: Evaluation of Prototype II in the Airs」
今回、2回目のポスター形式でない国際会議での発表でしたが、あまり緊張せずに落ち着いてできました。この経験を活かし、今後の研究活動をより一層頑張ろうと思います。
朴木 瞳
「Experimental Evaluation of Steady State Visual Evoked Potentials for Brain Machine Interface」
2回目の学会発表でしたが、プレゼン発表や国際会議ということも初めてであり、緊張しましたがいい勉強になりました。ベトナムの料理や気候、雰囲気などにも触れられたため、いい経験ができました。




IEEE/RSJ International Conference on Intelligent Robots and Systems
2017.9.24-2017.9.28 🡕
野村 友理香
「Experimental Evaluation of Aerial Attitude Control Unit with Reaction Wheels for Hopping Robots」
今回、初めての海外で初めての国際会議での発表だったので、英語にとても不安がありましたが、ポスターを見に来て下さった皆さんがフレンドリーだったので、あまり緊張せずにできました。学会中に頂いたお肉が美味しかったです。


日本設計工学会 2017年度 春期研究発表講演会
2017.5.20-2017.5.21 🡕
笹川 裕貴
「ドローンを用いた工学的教育研究」
初めての学会発表ということもあり、少し緊張していましたが落ち着いて発表することができました。発表時間が長かったため普段は報告できないような細かいことまで報告できてよかったです。質疑応答で頂いたコメントをもとに今後の研究を行っていきたいです。
野村 友理香
「リアクションホイールを用いたホッピングロボットの空中姿勢制御-自由落下時の空中姿勢の制御性能評価-」
3度目の学会発表であったため、あまり緊張せずに発表することができました。また、発表時間が長かったので、伝えたいことを的確に伝えることができたと思います。質疑応答で頂いたコメントを今後の研究に活かしていけるように頑張ります。

ロボティクス・メカトロニクス 講演会- 2017 in Fukushima
2017.5.10-2017.5.13 🡕
吉川 真実
「操作量の次元を考慮したクレーン吊り荷の制振制御の一設計手法」
ポスター形式の発表であったため、様々な方と意見交換ができました。この経験を今後の研究に活かしたいです。学会発表後のステーキまぜそば(大盛り)は、とても美味しかったです。
野村 友理香
「リアクションホイールを用いたホッピングロボットの空中姿勢制御-加速度外乱を考慮した相補フィルタの帯域選定とその評価-」
今回、2回目の学会発表でしたが、ポスター形式での発表は初めてで良い経験になりました。発表当日は、多くの人がポスターを見てくださり、多くの質問やアドバイスを頂きました。この経験を今後の研究に活かしていけるように頑張ろうと思います。
朴木 瞳
「定常状態視覚誘発電位に基づく人間の状態識別」
今回、初めて学会発表に参加し、良い経験ができました。ポスター発表では多くのコメントをもらい、大変勉強になりました。今後は頂いたコメントを研究に反映させ、より密度の高い研究成果を出したいと思います。


第17回計測自動制御学会 システムインテグレーション部門講演会
2016.12.15-2016.12.17 🡕
野村 友理香
「リアクションホイールを用いたホッピングロボットの空中姿勢制御」
今回、初めての学会発表ということで緊張しました。また、様々な分野の研究がされていることが分かり、色々と学ばせて頂きました。札幌での開催であったため寒かったのですが、ご飯はとても美味しかったです。今回の経験をこれからの研究に活かしていきたいと思います。
谷口 雅崇
「オプティカルフローセンサを用いたクレーン吊り荷の振れ角計測」
今回、計測自動制御学会に参加させていただきました。初めての学会発表ということで少々緊張しました。質疑応答では様々なコメントを頂くことができ、今後の研究に反映させより良いものにしたいと思います。




電気学会 メカトロニクス制御研究会
2016.9.29 🡕
石原 大知
「レーザー加工表機の応答特性を考慮したレーザー 照射軌跡の目標軌道生成」
電気学会のメカトロニクス制御研究会で、精密サーボシステムと制御技術をテーマとした研究会に参加した。精密サーボ(ナノスケールサーボ)技術を専門とする大学や、精密サーボ技術を用いた製品の開発・販売を行う企業の関係者が多く参加していた。そのため、質疑応答では内容の濃い討論が行われた。精密サーボを専門とする方々と内容の濃い討論を行えたことが、とても有意義であった。
第34回日本ロボット学会学術講演会
2016.9.7-2016.9.9 🡕
岩谷 篤
「位置指令に基づく吊り荷の制振制御」
清水 崇一朗
「遠隔操作システムのための把持物体の落下速度制御に基づいた把持力制御の性能評価」
本学会は、参加者が多く、歴史ある学会である。本学会に参加し、研究発表したことで、自身の研究の欠点や追加すべき要素が明確になった。
第32回ライフサポート学会大会
2016.9.4-2016.9.6 🡕
銭 智定
「筋電義手の前腕17動作識別のための周波数領域における特徴量解析」
佐藤 史也
「運動想起BMIにおける電極位置とチャネル数による識別率への影響」
LIFE2016は、人の生命・生活を維持・向上させるための生命関連の分野のほか、リハビリテーション・生活支援分野、生体計測・制御分野などの人の命や生活に関わる学術講演会である。医療系の研究発表もあるため、機械系の知見だけでなく、普段は触れることのない医療方面からの知見を得ることができた。



The 2015 IEEE International Conference on Systems, Man, and Cybernetics (SMC2015)
2015.10.9-2015.10.12 🡕
増田 美和
「Motion Design for Humanoids Based on Principal Component Analysis: Application to Human-Inspired Falling Motion Control」
この学会はIEEEのシステムに関する有名な国際会議の一つであり、今年のテーマは「Big Data Analytics for Human-Centric Systems」でした。セッションは、Systems、 Human-Machine Interaction、およびCyberneticsの3分野に大きく分類され、さらに、今年は、これにBrain Machine Interfaceのワークショップが併設されました。今回は946件の投稿の中から587件が採択され、最終的に407件が口頭で、141件がポスターの形式で発表されました。私は、10日のRobotics, Human Machine Interface, and Haptics (SMC2015-A06 )のセッションで発表を行いました。聴講者からは提案手法のロバスト性に関する質問などがあり、今後の研究に役立つ有意義なディスカッションができました。このセッションでは、他に遠隔操作システムの質量の変動に対応する制御手法、MATLABに代わる汎用シミュレータの開発事例、2つのマイクでの複数話者の特定など、ロボットにかかわる様々な発表が行われました。また、併設のBrain Machine Interfaceのワークショップにも参加し、いろいろと情報を得ることができました。学会のスケジュールがタイトで、あまり観光する時間はありませんでしたが、香港といえば100万ドルの夜景ということで、ピークトラムに乗ってビクトリアピークに登り、夜景を鑑賞してきました。前回の北米出張とはまた違った、アジアの情緒を感じられる楽しい出張でした。


The 2015 IEEE International Conference on Robotice and Automation
2015.5.26-2015.5.30 🡕
増田 美和
「Dynamic Motion Control of Humanoids Based on Kinematics and Learning Control:Is it possible without the equation of motion.」
この学会は、ロボットの分野では最も有名な国際会議の一つであり、参加者も約2700人と大規模な学会でした。私は、28日のLate Breaking Result Poster Sessionセッションで発表を行いました。本セッションでは研究テーマに関わらず、最新の研究成果についてポスター形式で発表が行われ、1時間半にわたり聴講者と議論が交わすことができました。学会中はヒューマノイドロボットに関するセッションなどを聴講し、人間の動作を規範としたロボットの学習制御や運動制御の手法について理解を深めることができました。また、この分野の企業が一堂に会する展示会も大きな魅力で、手術支援ロボット da Vinci(ダ・ヴィンチ)の操作などを体験しました。30日には、オプションのワシントン大学のラボツアーに参加し、日本とはまた違った米国の大学の研究室の雰囲気を感じることができました。Banquet receptionは音楽博物館(EMP)で、Farewell receptionは航空博物館で開催されるなど趣向も凝らされ、参加していて楽しい会議でした。