研究内容
当研究室では5つのグループに分かれ、ロボットをはじめとする機械システムへの制御理論の応用を研究しています。
ACG(Advanced Control Group):クレーン・先進的な制御手法班
ACG班とは
ACG(Advanced Control Group)班はクレーンと先進的な制御手法を研究しているグループです。
クレーン特有の課題分析や、制御理論の深化と多分野への応用展開を通じて、広く産業社会の安全性と効率向上への貢献を目指します。
研究内容
クレーンの操作支援
企業と共同で、初心者でも操作しやすいクレーンの研究をしています。
クレーンに揺れ止め制御を実装することで、安全かつ効率的に作業を行うことができます。そのうえでオペレータの操作を邪魔しないような制御系の実現を追求しています。製品化に向けて日々研究を重ねています。
.jpg)
転倒予防装具
人間の運動機能を補助するための能動関節を備えた装具について研究しています。足首関節の能動制御により転倒を抑制しつつ運動能力の向上を図る機器の開発を目的としています。
現在は、片脚支持期に相当するモデルとして4リンク機構を考え、足首に対応する2自由度関節を能動的に制御することで、倒立安定化を可能とする制御系の評価を行っています。
高精度位置決め制御
USPMコントローラを用いたナノスケール精度の位置決め制御技術
USPMコントローラに搭載された超高速A/Dコンバータなどを用いて、
・ 高速なマルチサンプリング
・ オンラインモデル同定
を行う
従来よりも高速・高精度な位置決め制御ができるように目指しています!!!


こんな人にオススメ
クレーン、高速位置決めをやりたい人や最先端の技術を扱い、自分のアイデアを形にしたい人はぜひACG班にお越しください。
AVG(Autonomous Vehicle Group):運転支援・自動運転班
AVG班とは
AVG(Autonomous Vehicle Group)班は運転支援システムと自動運転システムの研究を行っているグループです。 国土交通省によると、自動車の事故は9割がヒューマンエラーによるものだとされており、自動運転の実用化が求められています。しかし、実用化にはまだまだ課題があり、運転支援システムの発展と自動運転の課題解決が自動車の事故を減らす一番の近道であると我々は考え、事故を無くし快適な移動を実現するという目標のもと研究を行っています。
研究内容
運転支援
・運転技術を向上させる運転支援
・違和感が少なく乗り心地のよい運転支援
・初心者や高齢者の運転支援
運転支援システムはドライバーと人間が自動車の運転を協調しておこなうシステムです。近年、レーンキープアシストなど運転支援システムは実用化が盛んになり、なじみの深い技術となっています。運転支援システムによりドライバーの精神的肉体的疲労のどちらも減少したという研究結果もあり、疲労による自動車の事故減少効果が期待されています。そこで我々は運転支援システムが人間に与える影響に着目し、ドライバーの運転技術向上を促す運転支援システムや、ドライバーが自動車の制御に対して違和感を感じない支援システムの実現を目指しています。また、大量の車両走行データを用いたドライバーの熟練度の判別を行い、熟練者の経路設計の抽出を試みています。


自動運転
・車間距離の自動確保などの安全担保技術
・自動運転のための軌道生成
・障害物の自動回避
自動運転システムはドライバーが自動車の操作に関与しないシステムです。そのため、システムが自車の位置推定、リスク回避、軌道生成、車両制御を正確に行う必要があります。日本では高速道路の渋滞時のみを対象とした自動運転などから実用化が進むようです。しかしながら、通常走行時や一般道走行時ではまだまだ課題も多く、その実用化技術の開発が期待されています。我々の研究班では先行車と車間を維持しながら追従するアダプティブクルーズコントロールの改善、自動軌道生成時のリスク回避アルゴリズムの研究を行っています。
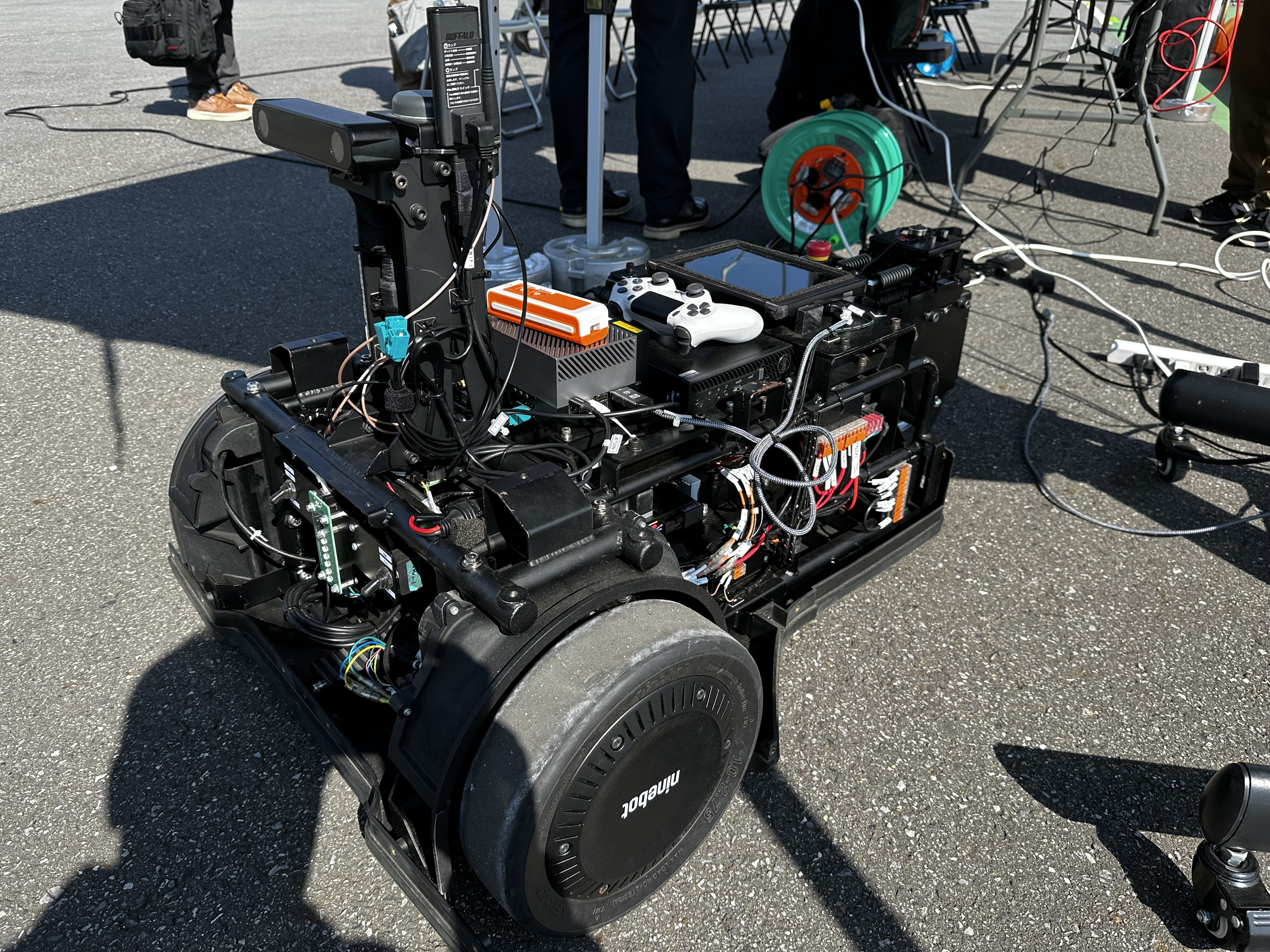
下図は本田技術研究所が支援するAI Formulaの実機です。差動二輪車両を用いた自律走行の研究をしています。そのため、第一段階として状態フィードバックを用いた軌道追従制御系の構築を行っています。
こんな人にオススメ
車が好きな人やドライビングシミュレーションを使ってみたい人、自動運転や運転支援に興味がある人はぜひAVG班にお越しください。
DRG(Disaster Rescue Group):災害救助班
DRG班とは
近年、自然災害が頻発する一方、救助隊の人員には限りがあります。
私たちはこの課題を解決するため、災害現場で人命救助や情報収集を支援するロボットの研究開発に取り組んでいます。
具体的には、ドローンによる広域偵察や、地雷探知技術を応用した危険物探査ロボットなど、多角的なアプローチを進めています。
研究内容
対人地雷探知除去
現在、世界中で行われている対人地雷除去の手段として、金属探知や地雷探知犬を利用したものが多く行われています。
このグループでは、人為的に行う地雷除去に対して機械学習を用いることで、従来では人でしかできなかった感覚的な作業をロボットに行わせることを目的に研究しています。


マルチコプター
足場の状況に左右されずに、点検・測量・農業・警備・物流など様々な活動が可能なドローンの需要は増加し続けています。
本研究では、目的に応じて機体の状態を変化させることで様々なシーンでの活動を可能とする新たな機構について研究しています。動作や周囲の状況に合わせて機構を変形させることで、ドローンの俊敏性や耐風性、安定性の向上を目指しています。


こんな人にオススメ
0から1を作れる人や世のため人のために研究したい人はぜひDRG班にお越しください。
HCR(Human Collaborative Robot):人協働ロボット班
HCR班とは
HCR班は、人と協調して動作するロボットの制御について日々研究しています。
現在は、大きく分けて人間と機械の協働と高機能モーションコントロールの2つの内容について取り組んでいます。
研究内容
人協働ロボット
人間と協調して動作するロボットに関してその制御の研究をしています。
具体的には、
・遠隔操作でロボットを操作するための訓練システム開発
・人間の機能を拡張するための筋電信号による第3の腕の研究
・ペルチェ素子を用いた接触温感、物の温度や熱容量の遠隔再現
・バイラテラル操作で、フォロワロボットの反力を強調して伝達し、オペーレータがリーダロボットを操作しやすくする研究
を行っています。


バイラテラル制御系(人協働ロボット)
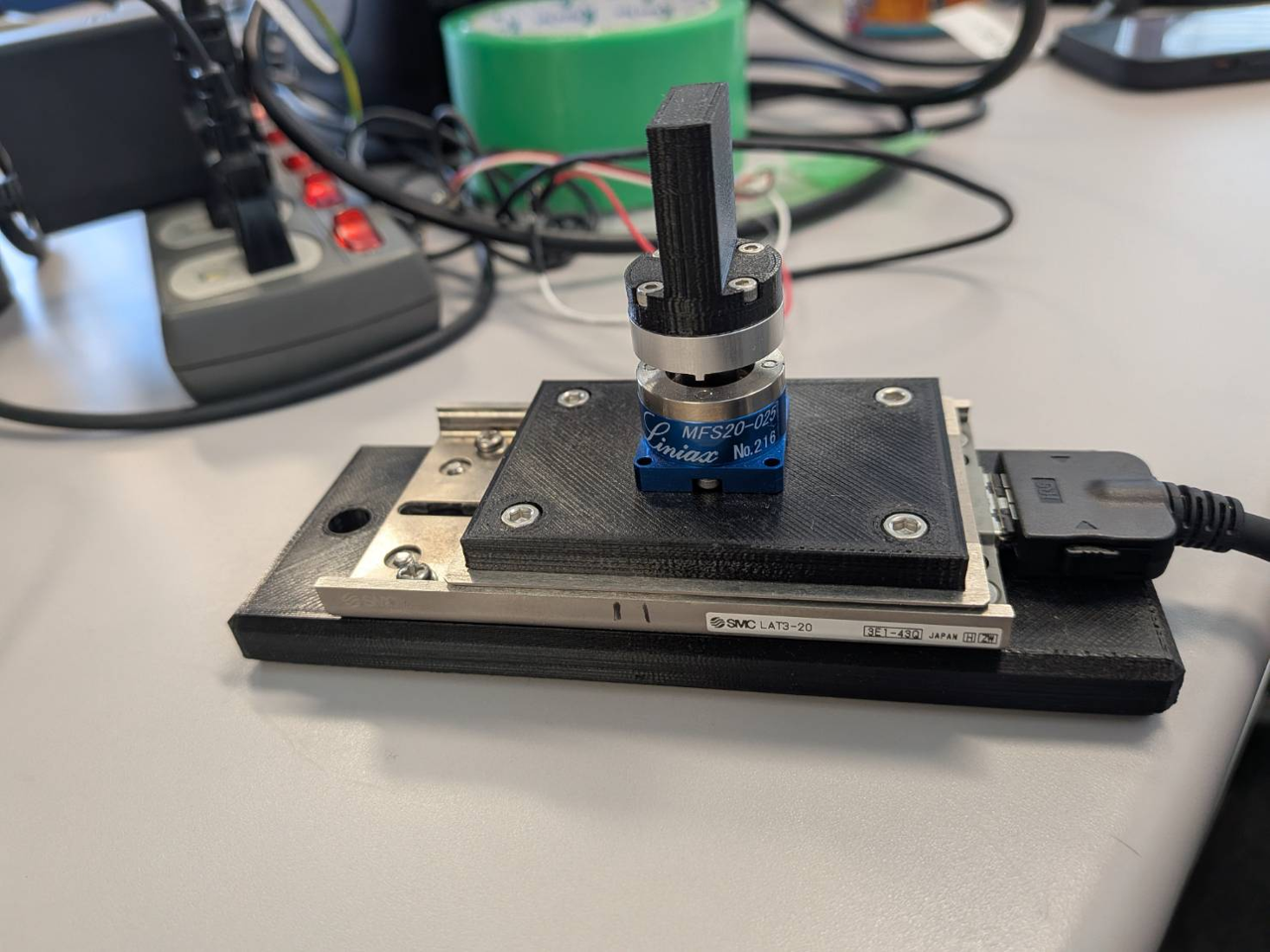
遠隔操作ロボットの制御法の1つである、バイラテラル制御について研究しています。バイラテラル制御は、操作者の指令通りにロボットが動くだけでなく、ロボット側からのものに接触している力の感覚などを操作者に伝えることができます。宇宙や深海など、人間が直接作業することが難しい環境で必要とされています。
下の動画は、実際に設計したバイラテラル制御系で遠隔操作を行っている様子です。
下段のアクチュエータに連動して上段のアクチュエータがスライドし、環境に接触した力感覚が下段にも伝わるようになっています。
こんな人にオススメ
人を中心とした制御や研究をしたい人、マニピュレータを使ってみたい人はぜひHCR班にお越しください。
LRG(Locomotive Robot Group):移動ロボット班
LRG班とは
近年では、様々な場面で人間と協働して作業を行うロボットの活躍が期待されています。
LRG班では生物の優れた能力や構造をロボットの設計に取り込むことで、移動ロボットの性能の向上を図ることを目指しています。
研究内容
ペンギンロボット
ペンギンのよちよち歩きはかわいいだけではなく、他の陸生脊椎動物と比較して効率的であるという報告があります。
そこで本研究では、ペンギンのよちよち歩きを二足歩行ロボットの歩行に適用することで、安定かつ効率的な歩行アルゴリズムの提案を目的とします。
下の動画は、ペンギンの骨格に基づいたモデルを用いた運動学シミュレーションです。このシミュレーションでは、姿勢を維持した状態での床の姿勢角の変更に伴う足先の位置を決定しています。
猫ひねりロボット
ネコは空中でくるりと姿勢を整えて、見事に脚から着地することができます。
この研究では、そんなネコのしなやかな動きをロボットで再現することを目指しています。
下の動画は、コンピュータを使ったシミュレーションです。このシミュレーションでは、ロボットの胴体の向きをコントロールしています。
移動マニピュレータ
台車型ロボットの上にマニピュレータが搭載されている、移動マニピュレータについて研究しています。
移動マニピュレータは、移動ロボットによる作業領域の広さと、マニピュレータによる精密な作業性能の両方の利点を兼ね備えたロボットです。自動化が進んでいる工場などでの活躍が期待されています。
左図は実際に研究で使用している移動マニピュレータです。
このロボットを用いて、人間と同じ空間で作業するための制御について研究しています。

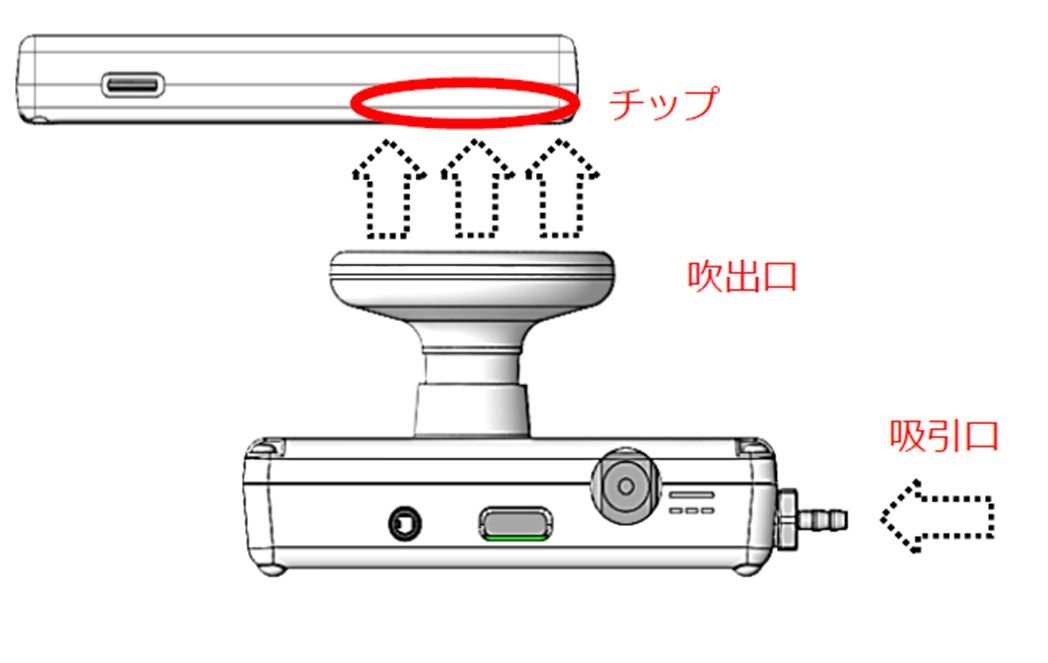
におい発生源の位置同定
においの分析は今現在、視覚や聴覚に比べて計測・解析技術が十分に発展していない分野です。本研究はにおい発生源の空間的位置の同定を目的としています。具体的には、ユーカリ,ローズ,クローブの3種類のにおいサンプルを対象に、付属のポンプを用いてセンサに導入し、その応答データを取得・解析しています。これらのにおいデータを用いて、機械学習によるにおい識別モデルを構築し、複数のにおいが混在する環境でも各におい成分を正確に認識できる装置の開発を目指しています。

こんな人にオススメ
生物のこんな動作や機能を実現してみたい、解明してみたい人はぜひLRG班にお越しください。